Igniton Gazeboとros_ign_bridgeのインストール
すでにROS2 Humbleがインストール済みとする
Ignition本体のインストール
sudo apt install ignition-fortress
インストールするバージョンに注意
ROS2のバージョンと対応するIgnition Gazebo の対応は以下を参照
ros_ign_bridgeのインストール
IgnitionのメッセージとROS2 メッセージを相互に変換するためのもの
sudo apt install ros-humble-ros-ign
サンプルのワールドで差動2輪ロボットを動かす
このページでいろいろなワールドが公開されているので、適当な差動2輪ロボットが動くWorldファイルをダウンロードする。
今回はtugbot_depot.sdfを使用
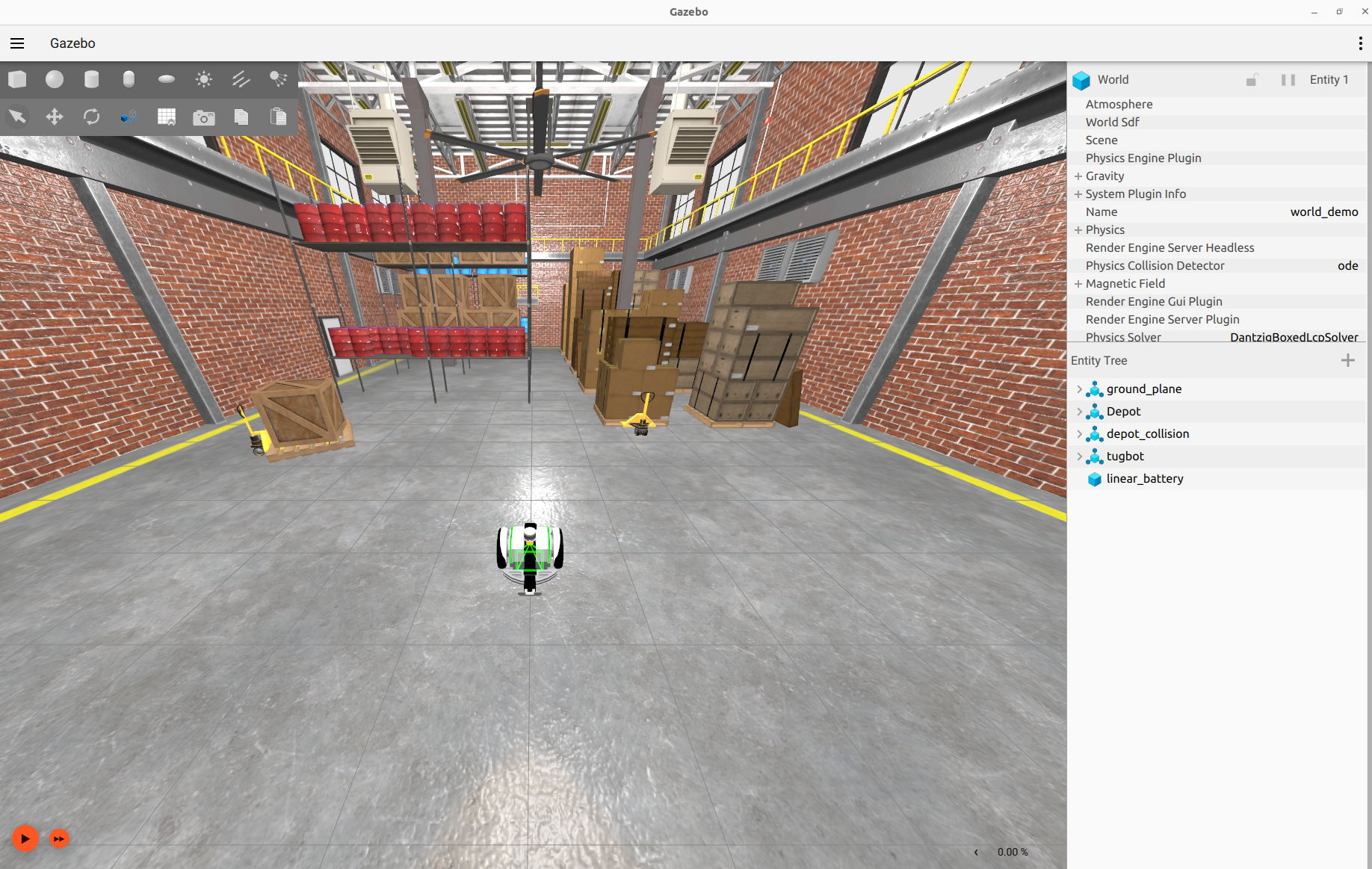
こちらのページからtugbot_depot.sdfファイルをダウンロードして起動
ign gazebo tugbot_depot.sdf
Ignitionからトピックを送って動かす
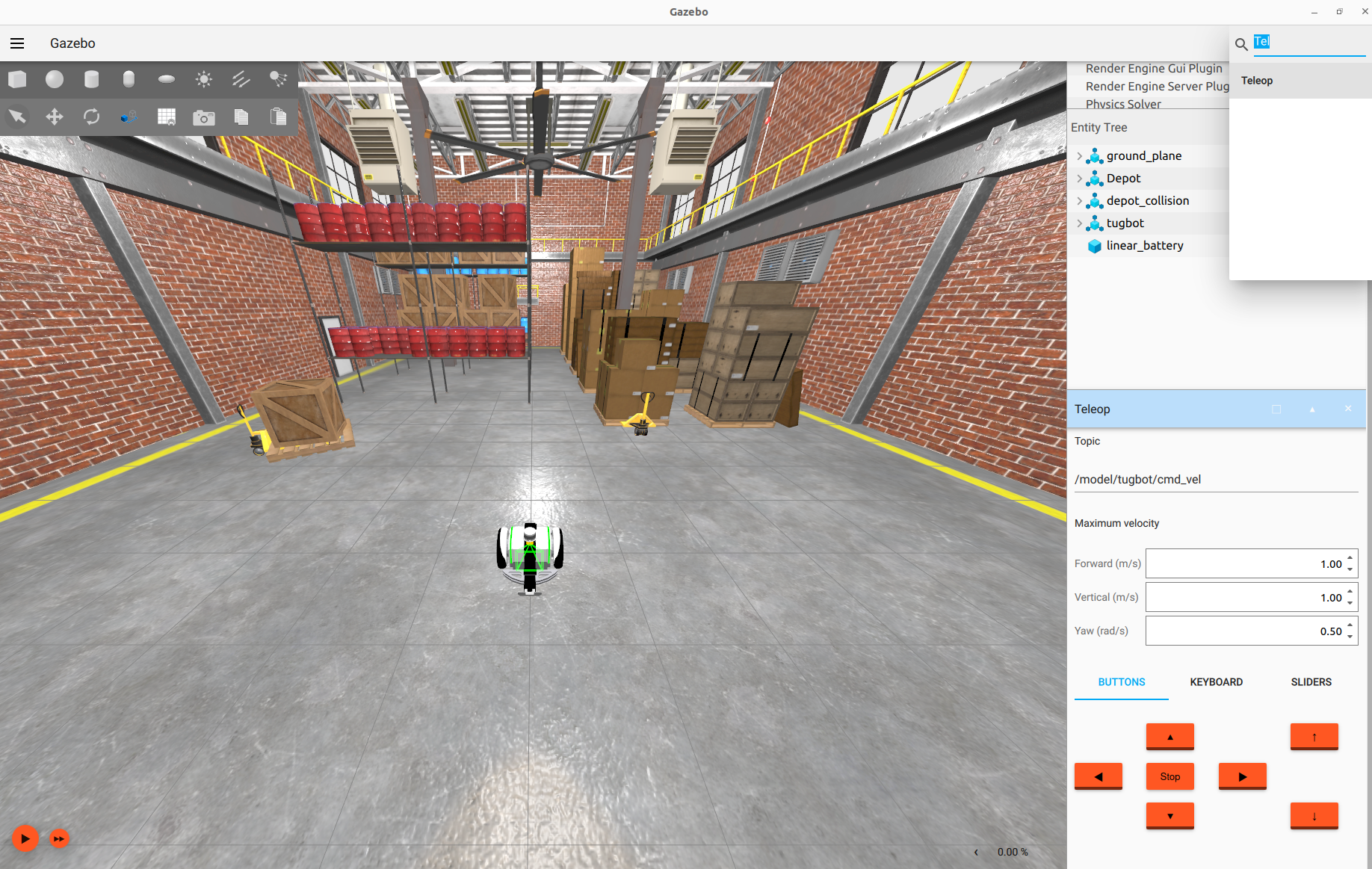
Ignition のGUIから動かす
・右上からTeleopと検索してTeleopのGUIを表示させる。
・Topic を/model/tugbot/cmd_velに変更する。
・左下の再生ボタンを押してからTeleopのボタンを押すとロボットが動く。
コマンドから動かす
ign topic コマンドで/model/tugbot/cmd_velに直接値を入力して動かす。
ign topic -t "/model/tugbot/cmd_vel" -m ignition.msgs.Twist -p "linear: {x: 1.0}"
ROS2からトピックを送って動かす
ros_ign_bridgeを起動してTwist型の/model/tugbot/cmd_velをbridgeする
ros2 run ros_ign_bridge parameter_bridge /model/tugbot/cmd_vel@geometry_msgs/msg/Twist@ignition.msgs.Twist
ros2 topic pub コマンドでトピックを送る
ros2 topic pub --once /model/tugbot/cmd_vel geometry_msgs/msg/Twist "{linear: {x: 1.0}}"
センサのトピックをROS2で見る
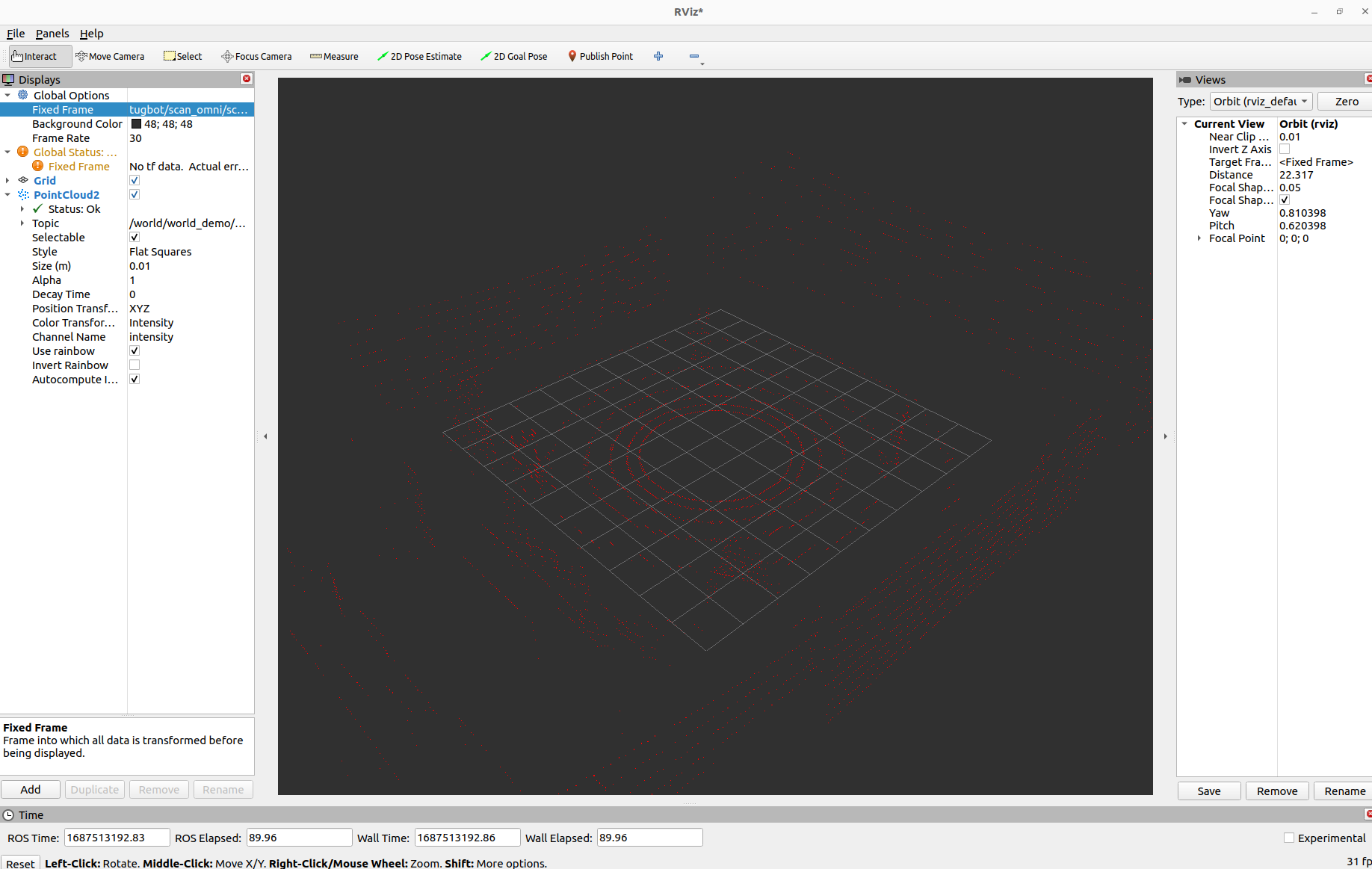
Velodyneの点群をrviz2で見る
ros2 run ros_ign_bridge parameter_bridge /world/world_demo/model/tugbot/link/scan_omni/sensor/scan_omni/scan/points@sensor_msgs/msg/PointCloud2@ignition.msgs.PointCloudPacked
rviz2を起動
Fixed Frameをtugbot/scan_omni/scan_omni にして、PointCloud2を表示
rviz2
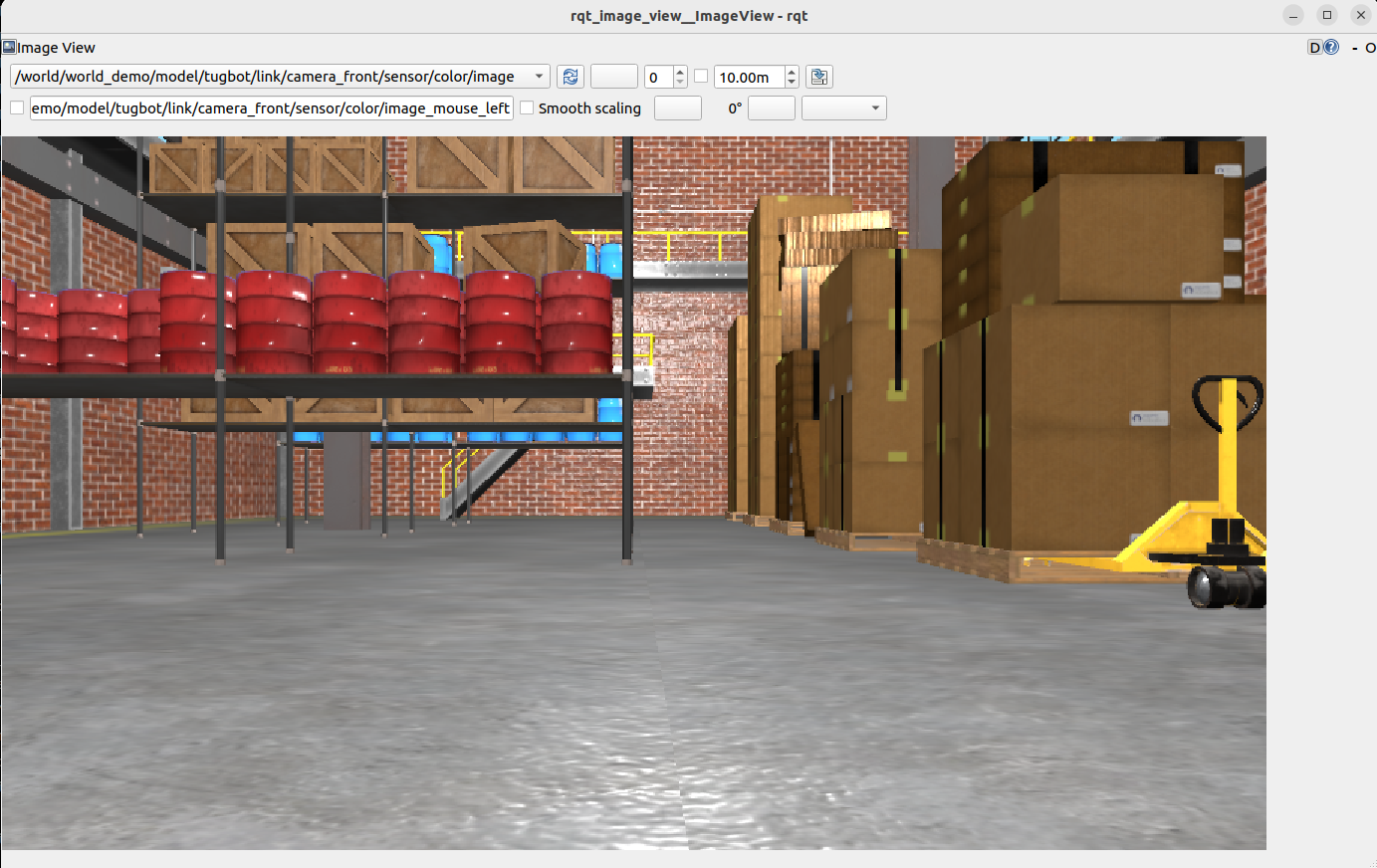
カメラの画像をrqt_image_viewで見る
ros2 run ros_ign_bridge parameter_bridge /world/world_demo/model/tugbot/link/camera_front/sensor/color/image@sensor_msgs/msg/Image@ignition.msgs.Image
rqt_image_viewを起動して画像を見る
ros2 run rqt_image_view rqt_image_view
TFの変換
ignition gazeboのDiff Drive pluginから出力されるTF 情報(odom <-> base_link)をROS2側で使えるようにする。
Gazebo側のトピック名/model/tugbot/tfを/tfにremapする。
ros2 run ros_ign_bridge parameter_bridge /model/tugbot/tf@tf2_msgs/msg/TFMessage@ignition.msgs.Pose_V --ros-args --remap /model/tugbot/tf:=/tf
ROS2側でrqt_tf_treeを実行した結果
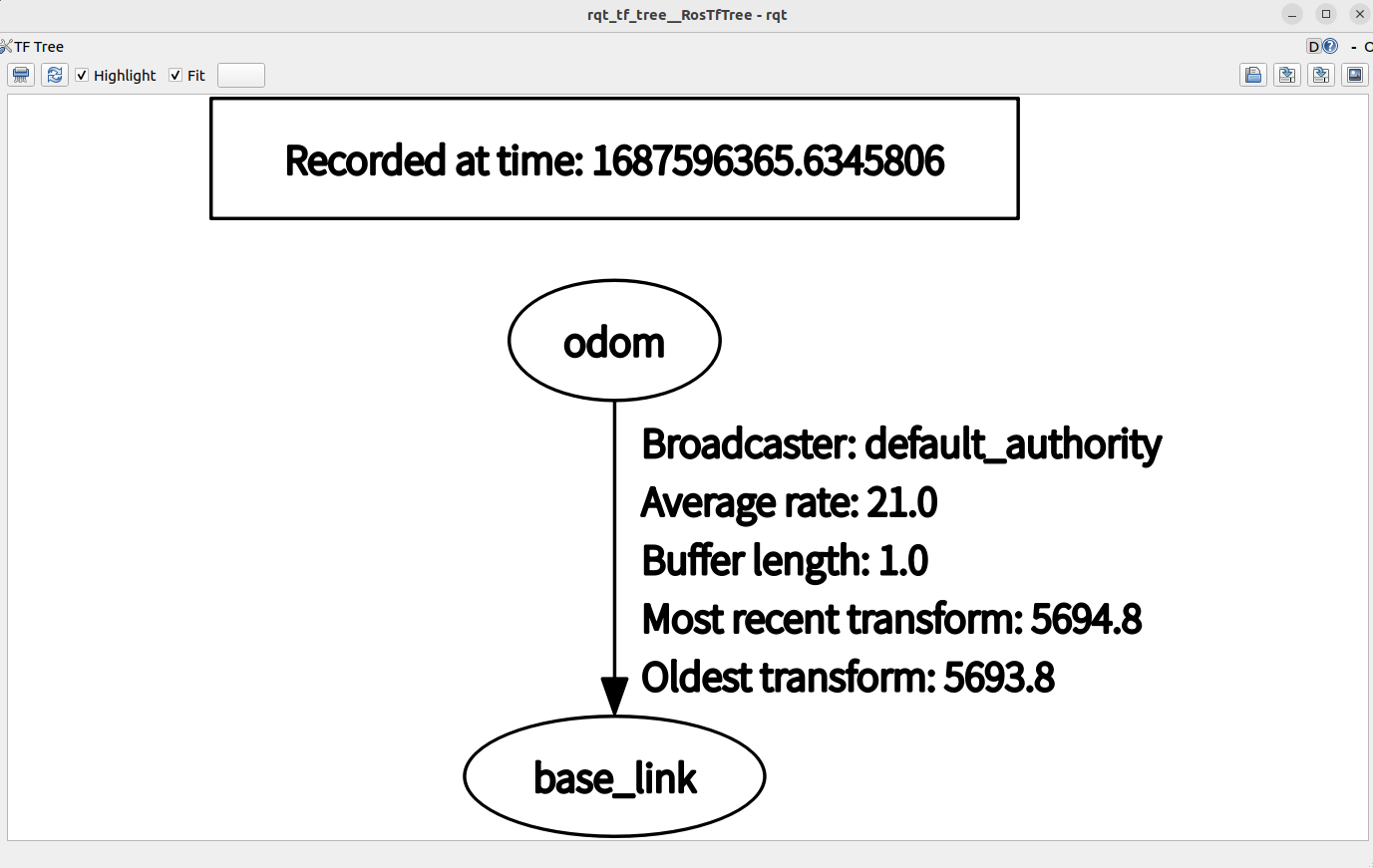
これでbase_linkから必要なセンサのframeのTFをstatic_transform_publisherなどで出力すれば、
ROS2側でSLAMしたり、Nav2で動かしたりできる。
おわりに
Igniton Gazeboとros_ignをインストールして、公開されているsdfを使用してROS2と連携して動かした。
間違っている点があればコメントでご指摘ください。
参考
その他
ignitionのコマンドメモ
ros2 topicコマンドと同じ感覚で操作できる
トピック一覧を見る
ign topic -l
指定したトピックに値を送信
ign topic -t /model/[model_name]/cmd_vel -m ignition.msgs.Twist -p '[command_values]':
トピックの値を見る
ign topic -e -t /model/[model_name]/cmd_vel
ros_ign_bridgeを起動するlaunchファイルの例
1つのトピックに対してros_ign_bridgeを起動するのは面倒くさいので、launchファイルでまとめて起動する例。
引数に複数のトピックを指定することで、1つのノードで複数のトピックをbridgeできる。
from launch import LaunchDescription
from launch_ros.actions import Node
def generate_launch_description():
return LaunchDescription([
Node(
package='ros_ign_bridge',
executable='parameter_bridge',
name='bridge_node',
arguments=[
'/model/tugbot/cmd_vel@geometry_msgs/msg/Twist@ignition.msgs.Twist',
'/world/world_demo/model/tugbot/link/scan_omni/sensor/scan_omni/scan/points@sensor_msgs/msg/PointCloud2@ignition.msgs.PointCloudPacked',
'/world/world_demo/model/tugbot/link/camera_front/sensor/color/image@sensor_msgs/msg/Image@ignition.msgs.Image',
'/model/tugbot/tf@tf2_msgs/msg/TFMessage@ignition.msgs.Pose_V'
],
remappings=[
('/model/tugbot/tf', '/tf')
],
output='screen'
)
])