前回の投稿でHT16K33ドライバーモジュールを使ってユニバーサル基板に4桁7セグLEDを4個接続する方法を解説しました。
18x6 LEDドライバーモジュールを使って4桁7セグメントLEDを4個接続する
今回はHT16K33ドライバーモジュールを使った4桁7セグメントLEDへの出力を pythonで制御する方法を解説します。
開発環境
- OS: Ubuntu 22.04
- python3.7: ソースコードからビルドしたpythonで仮想環境を作る
※1 実行環境がRaspberry Pi OS なので、そのOS上のpythonバージョンに合わせる
※2 インストールするライブラリは実行環境と同じ - Python IDE: Pycharm Community Edition for Linux
※1 実行環境は Headless OS のため Thonny Pyton IDE による開発はできない
※2 pythonスクリプトを直接実行することはできないが関数補完は可能
実行環境
- Rasbpebrry Pi Zero WH
- OS: Raspbian GNU/Linux 10 (buster) ※Headless OS
- python: 3.7.3
- 使用するライブラリ: pigpio
pip install pigpio
- 使用するライブラリ: pigpio
データシート
(1) システムセットアップレジスタ(内部システム発振器)
- 起動時 ON: 0x20 + 1
- シャットダウン時 OFF: 0x20 + 0

(2) ディスプレーセットアップレジスタ
- 起動時 ON: 0x80 + 1
- シャットダウン時 OFF: 0x80 + 0

(3) デジタル調光データ入力

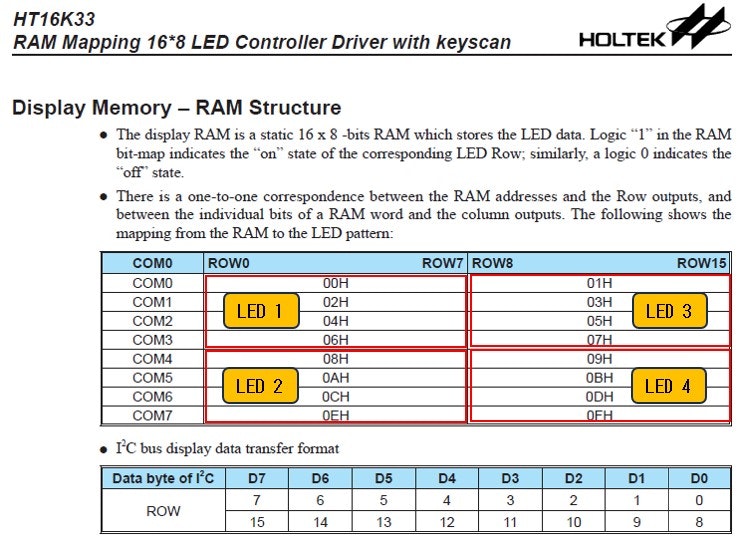
(4)メモリレイアウト
制御クラスの構成
- HT16K33モジュールを制御するベースクラス
GPIO制御用のPythonライブラリとして pigpio を使用
pigpio library Python interface - 4桁7セグメントLED表示制御クラス
ベースクラスを継承する

1. HT16K33ドライバーモジュール制御クラス
データシートに示された各種設定を操作するクラス
(1) 定数、列挙クラス
- パス番号 (BUS_NUM): 1
最近のラズパイのデフォルト。※この番号は変更可能なため定数として定義 - デジタル調光の最低値 (BRIGHTNESS_BASE): 0xe0
- Brightness (Enum)クラス
※4階調を定義
- Brightness (Enum)クラス
BUS_NUM = 1
BRIGHTNESS_BASE = 0xe0
class Brightness:
HIGH = 0x0f
MID = 0x08
LOW = 0x04
DIM = 0x02
(2) コンストラクタ
- 引数
- pi: pigpio オブジェクト
- slave_addr: I2Cデバイス (スレーブ) アドレス
- brightness: 接続デバイスの初期調光値
- 処理内容
- I2Cデバイス(キャラクタ・デバイス)ハンドルのオーブン
//crw-rw---- 1 root i2c 89, 1 12月 24 14:29 /dev/i2c-1
オープンしたI2Cデバイスハンドルをオブジェクトに保持する - システムセットアップ ON (0x21)
- ディスプレーセットアップ ON (0x81)
- 接続デバイスの初期調光値を設定
- I2Cデバイス(キャラクタ・デバイス)ハンドルのオーブン
class HT16K33:
MEM_LAST = 0x0f
def __init__(self, pi, slave_addr, bus_number=BUS_NUM, brightness=Brightness.MID):
self.pi = pi
self.i2c_handle = pi.i2c_open(bus_number, slave_addr)
self.opened = True
# System setup: Turn on System oscillator(発振器) [0x20 + 1(on)]
self.pi.i2c_write_byte(self.i2c_handle, 0x21)
# Display setup: Display on [0x80 + 1(on)]
self.pi.i2c_write_byte(self.i2c_handle, 0x81)
# Brightness: [0xe0 + f{1,0,0,0}]
self.pi.i2c_write_byte(self.i2c_handle, (BRIGHTNESS_BASE | brightness))
(3) クリーンアップ
- 処理内容
- メモリクリア
- ディスプレーセットアップ OFF (0x80)
- システムセットアップ OFF (0x20)
- オブジェクトのI2Cデバイスハンドルをクローズ
def cleanup(self):
# Poweroffでもメモリーの値は残っている
self.clear_memory()
# Display setup: Display off
self.pi.i2c_write_byte(self.i2c_handle, 0x80)
# System setup: Turn on System oscillator off
self.pi.i2c_write_byte(self.i2c_handle, 0x20)
self.pi.i2c_close(self.i2c_handle)
self.opened = False
(4) 調光値の変更
任意の時点でデバイスの調光値を変更する
def set_brightness(self, brightness):
self.pi.i2c_write_byte(self.i2c_handle, (BRIGHTNESS_BASE | brightness))
(5) メモリクリア
メモリ(バイト単位)に [0x0] を設定する
※デバイスが表示器の場合は消灯
def clear_memory(self):
for m_addr in range(self.MEM_LAST + 1):
self.pi.i2c_write_byte_data(self.i2c_handle, m_addr, 0x0)
(6) データ転送関数
指定されたメモリの開始アドレスに N 桁分のデータを設定する
※1 想定する最大桁数は4桁分
※2 前回送信したアドレスに2バイト分加算したアドレスが次の送信アドレスになる
def send_data(self, start_reg, datas):
# 送信データを下位メモリから送信する
reg = start_reg
for i in range(len(datas)):
val = datas[i]
self.pi.i2c_write_byte_data(self.i2c_handle, reg, val)
reg += 0x02
(7) 全ソースの再掲
※ログ出力処理を含んでいます。
import logging
"""
LEDドライバモジュール(HT16K33)制御クラス for pigpio
"""
BUS_NUM = 1
BRIGHTNESS_BASE = 0xe0
class Brightness:
HIGH = 0x0f
MID = 0x08
LOW = 0x04
DIM = 0x02
class HT16K33:
MEM_LAST = 0x0f
def __init__(self, pi, slave_addr, bus_number=BUS_NUM, brightness=Brightness.MID, logger=None):
self.pi = pi
# i2c_handle = /dev/self.i2c_bus-1
self.i2c_handle = pi.i2c_open(bus_number, slave_addr)
self.logger = logger
self.debug_once = logger is not None and (logger.getEffectiveLevel() <= logging.DEBUG)
if logger is not None:
logger.info("i2c_handle: {}".format(self.i2c_handle))
self.opened = True
# System setup: Turn on System oscillator(発振器) [0x20 + 1(on)]
self.pi.i2c_write_byte(self.i2c_handle, 0x21)
# Display setup: Display on [0x80 + 1(on)]
self.pi.i2c_write_byte(self.i2c_handle, 0x81)
# Brightness: [0xe0 + f{1,0,0,0}]
self.pi.i2c_write_byte(self.i2c_handle, (BRIGHTNESS_BASE | brightness))
def clear_memory(self):
for m_addr in range(self.MEM_LAST + 1):
self.pi.i2c_write_byte_data(self.i2c_handle, m_addr, 0x0)
def debug_memory(self):
for m_addr in range(0x0f + 1):
r_data = self.pi.i2c_read_byte_data(self.i2c_handle, m_addr)
if self.debug_once:
self.logger.debug("r_data[{:#04x}]: {:#04x}".format(m_addr, r_data))
def cleanup(self):
# Poweroffでもメモリーの値は残っている
self.clear_memory()
# Display setup: Display off
self.pi.i2c_write_byte(self.i2c_handle, 0x80)
# System setup: Turn on System oscillator off
self.pi.i2c_write_byte(self.i2c_handle, 0x20)
self.pi.i2c_close(self.i2c_handle)
self.opened = False
# クリーンアップ途中でクローズに失敗した場合に単独で実行
def force_close(self):
if self.opened:
self.pi.i2c_close(self.i2c_handle)
def send_data(self, start_reg, datas):
# 送信データを下位メモリから送信する
reg = start_reg
for i in range(len(datas)):
val = datas[i]
self.pi.i2c_write_byte_data(self.i2c_handle, reg, val)
reg += 0x02
def set_brightness(self, brightness):
self.pi.i2c_write_byte(self.i2c_handle, (BRIGHTNESS_BASE | brightness))
2. 4桁7セグメントLED出力制御
2-1. 出力仕様
2-1-1. 出力文字に対応する16進表現

2-1-2. 4桁7セグメントLEDの配線位置と出力する桁に対応するメモリ構造

2-2. 4桁7セグメントLED出力制御クラス
- カソードコモンのみを対象とする
- 数値出力: マイナスを含め4桁
- 整数: -999 〜 9999
- 実数 (小数点第1位固定): -99.9 〜 999.9
※ デバック用ログ出力は省略
2-2-1. インポートと他のクラス定義
- LEDのカソード・アノード区分 Enumクラス定義 (LEDCommon)
- 出力する4桁7セグメントLEDの番号 Enumクラス定義 (LEDNumber)
import logging
from enum import Enum
from .ht16k33 import HT16K33, BUS_NUM
class LEDCommon(Enum):
CATHODE = 0
ANODE = 1
class LEDNumber(Enum):
N1 = 0
N2 = 1
N3 = 2
N4 = 3
2-2-2. クラス外の関数定義
(1) 整数値を数字の逆順リストに変換する処理
DIGIT = 4
def _make_digits(number):
"""
数値を数字のリストに変換する (リストは逆順になる)
(例) 123 -> [3, 2, 1]
:param number: 数値(最大4桁の整数 or マイナスの場合は3桁)
:return: 数値を逆順にした数字のリスト
"""
digits = []
num, mod = number, 0
for _ in range(DIGIT):
num, mod = divmod(num, 10)
digits.append(mod)
if num == 0:
break
return digits
上記処理で生成される数値リストのイメージは下記のようにになります。

2-2-3. 4桁7セグメントLED制御クラス
(1) クラスの定数定義
- 数字の16進数表現配列: SEG_CHAR
- ハイフン(マイナス)の16進数表現: SEG_MINUS
- エラー表示用('EEEE')の16進数表現: SEG_ERRORS
- 初期表示用('----')の16進数表現: SEG_OUTOFRANGE
- 各4桁7セグメントLEDに出力するメモリ開始アドレス
REG_LED1 〜 REG_LED4 - カソードコモンLEDのメモリアドレスマップ: STAREG_CATHODE
class LED4digit7Seg(HT16K33):
# 表示文字定義: [0, 1, 2, 3, 4, 5, 6, 7, 8, 9]
SEG_CHAR = [0x3f, 0x06, 0x5b, 0x4f, 0x66, 0x6d, 0x7d, 0x07, 0x7f, 0x67]
# ハイフン:'-'
SEG_MINUS = 0x40
# エラー:'EEEE'
SEG_ERRORS = [0x79] * DIGIT
# 測定不能:'----'
SEG_OUTOFRANGE = [SEG_MINUS] * DIGIT
# メモリ開始アドレス
REG_LED1 = 0x00
REG_LED2 = 0x08
REG_LED3 = 0x01
REG_LED4 = 0x09
# メモリ開始アドレスマップ
STAREG_CATHODE = {LEDNumber.N1: REG_LED1, LEDNumber.N2: REG_LED2, LEDNumber.N3: REG_LED3, LEDNumber.N4: REG_LED4}
(2) コンストラクタ
- 引数
- pi: pigpio オブジェクト
- slave_addr: I2Cデバイス (スレーブ) アドレス
- brightness: 接続デバイスの初期調光値
- 7セグメントLEDのコモン種別
- 処理内容
- スーパークラス(HT16K33)のコンストラクタ呼び出し
- オブジェクトに7セグメントLEDのコモン種別を保持
def __init__(self, pi, slave_addr, bus_number=BUS_NUM, brightness=None,
common=LEDCommon.CATHODE):
super().__init__(pi, slave_addr, bus_number, brightness=brightness)
self.common = common
(3) メモリに転送するデータの初期化
※整数データ、実数データ共通
datas = [0] * DIGIT // DIGIT=4
※4桁7セグメントLEDの全ての桁が消灯となる

2-2-3-1. 整数データの転送用データ変換処理
(1) 数字の逆順リストから転送用データを生成
- 処理手順
- 転送用データの初期化
- 正の数値リストをメモリ転送用データの4桁目から格納
- 元の整数値がマイナスの場合
- 最後のデータの1つ前 (先頭側) にマイナスの16進表現を設定
def _make_int_datas(self, digits, has_minus=False):
# カソードコモンLED用
datas = [0] * DIGIT
# 数値列(入力値の逆順で4桁目が先頭)を送信データの4桁目から格納する
elem = DIGIT - 1
for i in range(len(digits)):
datas[elem] = self.SEG_CHAR[digits[i]]
elem -= 1
# 整数値がマイナスのケースに対応
if has_minus:
# 正数部分は1桁少ない
elem -= 1
datas[elem] = self.SEG_MINUS
return datas
(2) 整数値を転送用データに変換する
- 処理手順
- 整数値がマイナスの場合
- マイナスフラグをONにセット
- 正の整数値に変換
- 正の整数値を数字の逆順リストに変換
- 数字の逆順リストからメモリ転送用データを生成する
- 整数値がマイナスの場合
def _generate_int_datas(self, number):
is_minus = False
if number >= 0:
val = number
else:
# マイナスなら絶対値にしてマイナスフラグをTrueに設定
val = abs(number)
is_minus = True
digits = _make_digits(val)
datas = self._make_int_datas(digits, has_minus=is_minus)
return datas
この処理で生成される転送用データの表示イメージは以下のようになります。

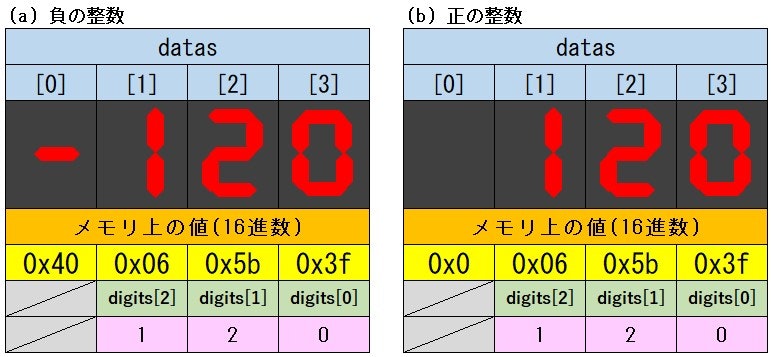

(3) 整数値の出力処理
メインのアプリケーションから呼び出される
- 引数
- 整数データ: int_val
- 出力するLED番号: led_num
- 処理内容
- 数値チェック
- 範囲外の数値
- 範囲外(オールハイフン)のメモリ転送用データを生成
- 有効な数値
- 数値データをメモリ転送用データに変換する
- 範囲外の数値
- LED番号に対応する開始アドレス (カソードコモン用) を取得する
- 開始アドレスとメモリ転送用データをHT16K33オブジェクトに設定
※指定したLED番号の4桁7セグメントLEDに数値が表示される
- 数値チェック
def printInt(self, int_val, led_num=LEDNumber.N1):
if int_val < -999 or int_val > 9999:
datas = self.SEG_OUTOFRANGE
else:
datas = self._generate_int_datas(int_val)
stareg = self.STAREG_CATHODE[led_num]
self.send_data(stareg, datas)
2-2-3-2. 実数データの転送用データ変換処理
- 処理手順
- 空の仮データリストを生成
- 数値がマイナスの場合
- 仮データリストにマイナスの16進数表現をセット
- 正の実数に変換
- 数値を小数点第1位で四捨五入してから文字列に変換
- 文字列の長さ分処理を繰り返す
- ドットが出現した場合
- 前の数値 (16進数表現) に128をプラスする
- 次の文字を処理する
- 数値の文字列に対応する16進数表現を仮データリストに追加する
- ドットが出現した場合
- ドットが出現しなかった場合
- 仮データリスト末尾の16進数表現に128をプラスする
- 小数点以下のゼロを補う
- 転送用データの初期化
- 仮データリストを転送用データに逆順で格納しなおす
def _generate_float_datas(self, float_val):
t_datas = []
# 数値が負なら先頭にマイナスのLED表現をセット
if float_val < 0:
t_datas.append(self.SEG_MINUS)
# マイナス符号を除去
float_val *= -1
# 浮動小数点の場合は文字列に変換 ※小数点1桁で4捨5入
s_val = str(round(1.0 * float_val, 1))
has_dot = False
for s in list(s_val): # 数値文字列をリストに変換
if s == '.':
# ドットが出現したら前の数値に128をプラス
t_datas[len(t_datas) - 1] += 128
has_dot = True
continue
# ドット以外は数値
t_datas.append(self.SEG_CHAR[ord(s) - 48]) # '0': 48, '1':49, ...
# ドットの出現有無判定
if not has_dot:
# 出現しなかったら配列末尾の数値表現+128
t_datas[len(t_datas) - 1] += 128
# 小数点以下のゼロを補う
t_datas.append(self.SEG_CHAR[0])
# 出力用4桁バッファに逆順に格納しなおす
datas = [0] * DIGIT
pos = DIGIT
for i in range(len(t_datas) - 1, -1, -1):
pos -= 1
datas[pos] = t_datas[i]
return datas
この処理で生成される転送用データの表示イメージは以下のようになります。


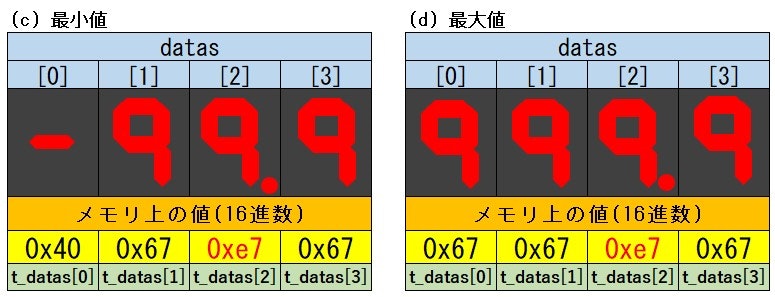
(2) 実数値の出力処理
メインのアプリケーションから呼び出される
- 引数
- 実数データ: float_val ※小数点第1位固定
- 出力するLED番号: led_num
- 処理内容
- 数値チェック
- 範囲外の数値
- 範囲外(オールハイフン)のメモリ転送用データを生成
- 有効な数値
- 数値データをメモリ転送用データに変換する
- 範囲外の数値
- LED番号に対応する開始アドレス (カソードコモン用) を取得する
- 開始アドレスとメモリ転送用データをHT16K33オブジェクトに設定
※指定したLED番号の4桁7セグメントLEDに数値が表示される
- 数値チェック
def printFloat(self, float_val, led_num=LEDNumber.N1):
if float_val < -99.9 or float_val > 999.9:
datas = self.SEG_OUTOFRANGE
else:
datas = self._generate_float_datas(float_val)
stareg = self.STAREG_CATHODE[led_num]
self.send_data(stareg, datas)
(3) 全ソース再掲
※1 ログ出力処理を含んでいます。
※2 アノードコモン用のLED出力 (最大2個) にも対応してます。
import logging
from enum import Enum
from .ht16k33 import HT16K33, BUS_NUM
"""
LEDドライバモジュール(HT16K33)を使った4桁7セグメントLED表示ライブラリ for pigpio
最大4個まで出力
[出力仕様]
(1) 整数値: -999 〜 9999
(2) 実数値: -99.9 〜 999.9 ※小数点第1位
[部品]
4桁7セグLED x 1〜4個
16x8マトリクスLEDドライバモジュール(HT16K33) x 1個
"""
DIGIT = 4
def _make_digits(number):
"""
数値を数字のリストに変換する (リストは逆順になる)
(例) 123 -> [3, 2, 1]
:param number: 数値(最大4桁の整数 or マイナスの場合は3桁)
:return: 数値を逆順にした数字のリスト
"""
digits = []
num, mod = number, 0
for _ in range(DIGIT):
num, mod = divmod(num, 10)
digits.append(mod)
if num == 0:
break
return digits
def _to_bins(val):
"""
数値の2進数計算 ※アノードコモンのみ
:param val:数値
:return: 2進数のリスト
"""
# 配列は8bit分初期化
bins = [0] * 8
num, mod = val, 0
for i in range(8):
num, mod = divmod(num, 2)
bins[i] = mod
if num == 0:
break
# ビット計算用に逆順にする
return bins[::-1]
class LEDCommon(Enum):
CATHODE = 0
ANODE = 1
class LEDNumber(Enum):
N1 = 0
N2 = 1
N3 = 2
N4 = 3
class LED4digit7Seg(HT16K33):
# 表示文字定義: [0, 1, 2, 3, 4, 5, 6, 7, 8, 9]
SEG_CHAR = [0x3f, 0x06, 0x5b, 0x4f, 0x66, 0x6d, 0x7d, 0x07, 0x7f, 0x67]
# ハイフン:'-'
SEG_MINUS = 0x40
# エラー:'EEEE'
SEG_ERRORS = [0x79] * DIGIT
# 測定不能:'----'
SEG_OUTOFRANGE = [SEG_MINUS] * DIGIT
# [LED1] DIG1:COM0(0x00),DIG2:COM1(0x02),DIG3:COM2(0x04),DIG4:COM3(0x06)
# ROW7(dp[3]), ROW6(g[5]), ROW5(f[10]), ROW4(e[1]), ROW3(d[2]), ROW2(c[4]), ROW1(b[7]), ROW0(a[11])
REG_LED1 = 0x00
# [LED2] DIG1:COM4(0x08),DIG2:COM5(0x0A),DIG3:COM6(0x0C),DIG4:COM7(0xEH)
# ROW7, ROW6(D6),..., ROW1, ROW0
REG_LED2 = 0x08
# [LED3] DIG1:COM0(0x01),DIG2:COM1(0x03),DIG3:COM2(0x05),DIG4:COM3(0x07)
# ROW15(dp[3]), ROW14(g[5]), ROW13(f[10]), ROW12(e[1]), ROW11(d[2]), ROW10(c[4]), ROW9(b[7]), ROW8(a[11])
REG_LED3 = 0x01
# [LED4] DIG1:COM4(0x09),DIG2:COM5(0x0B),DIG3:COM6(0x0D),DIG4:COM7(0xFH)
# ROW15, ROW14,..., ROW9, ROW8
REG_LED4 = 0x09
# アノードコモン
REG_ANODE_LED1 = REG_LED1
REG_ANODE_LED2 = REG_LED3
# メモリ開始アドレスマップ
STAREG_CATHODE = {LEDNumber.N1: REG_LED1, LEDNumber.N2: REG_LED2, LEDNumber.N3: REG_LED3, LEDNumber.N4: REG_LED4}
STAREG_ANODE = {LEDNumber.N1: REG_ANODE_LED1, LEDNumber.N2: REG_ANODE_LED2}
def __init__(self, pi, slave_addr, bus_number=BUS_NUM, common=LEDCommon.CATHODE,
brightness=None, logger=None):
super().__init__(pi, slave_addr, bus_number, brightness=brightness, logger=logger)
self.common = common
self.logger = logger
self.debug_once = logger is not None and (logger.getEffectiveLevel() <= logging.DEBUG)
def _make_int_datas(self, digits, has_minus=False):
# カソードコモンLED用
datas = [0] * DIGIT
# 数値列(入力値の逆順で4桁目が先頭)を送信データの4桁目から格納する
elem = DIGIT
for i in range(len(digits)):
elem -= 1
datas[elem] = self.SEG_CHAR[digits[i]]
# 整数値がマイナスの場合は先頭側にマイナスの16進数表現を追加
if has_minus:
elem -= 1
datas[elem] = self.SEG_MINUS
return datas
def _convert_anode(self, cathode_datas):
# カソードコモンLED用データをアノードコモンLED用に変換
datas = [0] * 8
for row in range(len(cathode_datas)):
val = cathode_datas[row]
val_bins = _to_bins(val)
if self.debug_once:
self.logger.debug("cathode_datas[{0}]: ({1}) - {1:#04x}".format(row, val))
self.logger.debug("val_bins: {}".format(val_bins))
# 8bit分: D7,D6,D5,D4, D3, D2, D1, D0
# 0, 0, 0, 0, <<3,<<2,<<1,<<0
for com_j in range(8):
datas[com_j] = datas[com_j] | (val_bins[com_j] << (3 - row))
return datas
def _generate_int_datas(self, number):
is_minus = False
if number >= 0:
val = number
else:
# マイナスなら絶対値にしてマイナスフラグをTrueに設定
val = abs(number)
is_minus = True
# 数値を数字の逆順配列に変換する
digits = _make_digits(number)
if self.debug_once:
self.logger.debug("number: {} -> digits: {}".format(number, digits))
# ドライバーモジュールのメモリ形式に変換
datas = self._make_int_datas(digits, has_minus=is_minus)
if self.debug_once:
self.logger.debug("datas: {}".format(datas))
if self.common == LEDCommon.ANODE:
# アノードコモンLEDに変換
datas = self._convert_anode(datas)
if self.debug_once:
for i, data in enumerate(datas):
self.logger.debug("datas[{}]: {:#04x}".format(i, data))
return datas
def _generate_float_datas(self, float_val):
if self.debug_once:
self.logger.debug("float_val: {}".format(float_val))
t_datas = []
# 数値が負なら先頭にマイナスのLED表現をセット
if float_val < 0:
t_datas.append(self.SEG_MINUS)
# マイナス符号を除去
float_val *= -1
# 浮動小数点の場合は文字列に変換 ※小数点1桁で4捨5入
s_val = str(round(1.0 * float_val, 1))
has_dot = False
for s in list(s_val): # 数値文字列をリストに変換
if s == '.':
# ドットが出現したら前の数値に128をプラス
t_datas[len(t_datas) - 1] += 128
has_dot = True
continue
# ドット以外は数値
t_datas.append(self.SEG_CHAR[ord(s) - 48]) # '0': 48, '1':49, ...
# ドットの出現有無判定
if not has_dot:
# 出現しなかったら配列末尾の数値表現+128
t_datas[len(t_datas) - 1] += 128
# 小数点以下のゼロを補う
t_datas.append(self.SEG_CHAR[0])
if self.debug_once:
for i in range(len(t_datas)):
self.logger.debug("t_datas[{}]: {:#04x}".format(i, t_datas[i]))
# 出力用4桁バッファに逆順に格納しなおす
datas = [0] * DIGIT
pos = DIGIT
for i in range(len(t_datas) - 1, -1, -1):
pos -= 1
datas[pos] = t_datas[i]
if self.debug_once:
for i in range(len(datas)):
self.logger.debug("datas[{}]: {:#04x}".format(i, datas[i]))
return datas
def printFloat(self, float_val, led_num=LEDNumber.N1):
if float_val < -99.9 or float_val > 999.9:
datas = self.SEG_OUTOFRANGE
if self.logger is not None:
self.logger.warning("float value is out of range: {}".format(float_val))
else:
datas = self._generate_float_datas(float_val)
if self.common == LEDCommon.ANODE:
# アノードコモン: アノードコモン用のデータに変換
datas = self._convert_anode(datas)
stareg = self.STAREG_CATHODE[led_num] if self.common == LEDCommon.CATHODE else self.STAREG_ANODE[led_num]
self.send_data(stareg, datas)
def printInt(self, int_val, led_num=LEDNumber.N1):
if int_val < -999 or int_val > 9999:
datas = self.SEG_OUTOFRANGE
if self.logger is not None:
self.logger.warning("int value is out of range: {}".format(int_val))
else:
datas = self._generate_int_datas(int_val)
stareg = self.STAREG_CATHODE[led_num] if self.common == LEDCommon.CATHODE else self.STAREG_ANODE[led_num]
self.send_data(stareg, datas)
def printOutOfRange(self, led_num=LEDNumber.N1):
"""
範囲外: '----'
:param led_num: 出力先LED
"""
stareg = self.STAREG_CATHODE[led_num] if self.common == LEDCommon.CATHODE else self.STAREG_ANODE[led_num]
self.send_data(stareg, self.SEG_OUTOFRANGE)
def printError(self, led_num=LEDNumber.N1):
"""
測定値エラー: 'EEEE'
:param led_num: 出力先LED
"""
stareg = self.STAREG_CATHODE[led_num] if self.common == LEDCommon.CATHODE else self.STAREG_ANODE[led_num]
self.send_data(stareg, self.SEG_ERRORS)
3. メインアプリケーション
下記のように出力する Ptyhonアプリケーションのコードを示します。
※1 1分後に全ての4桁7セグメントLEDが消灯して終了
※2 エラー処理は省略

import logging
from lib.led4digit7seg import LED4digit7Seg, LEDCommon, LEDNumber
from log import logsetting
if __name__ == '__main__':
logging.basicConfig(format='%(levelname)s %(message)s')
app_logger = logging.getLogger(__name__)
app_logger.setLevel(level=logging.DEBUG)
# pigpioオブジェクト生成
pi = pigpio.pi()
# 本来はここで pigpioサービスが起動されているかチェックする
i2c_slave_addr = 0x70
# カソードコモンを指定
led_common = LEDCommon.CATHODE
led_driver = LED4digit7Seg(pi, i2c_slave_addr, common=led_common, logger=logger)
try:
led_driver.printFloat(26.7, led_num=LEDNumber.N1)
led_driver.printFloat(20.5, led_num=LEDNumber.N2)
led_driver.printFloat(56.7, led_num=LEDNumber.N3)
led_driver.printInt(1002, led_num=LEDNumber.N4)
# 1分後に終了
time.sleep(60.0)
except KeyboardInterrupt:
pass
finally:
led_driver.cleanup()
logger.info("Finished!")
参考までに上記画面のpythonアプリケーションのソースを下記GitHubで公開しています。
気象データ表示板の制御プログラム (Pythonソースコード)
Github@pipito-yukio/home_weather_sensors/raspi_zero/bin/pigpio