はじめに
動作環境
Ubuntu 22.04
ROS2 humble
SLAMTEC RPLiDAR C1

↓ 説明書
手順
基本的にはREADMEの手順に従いますが、若干異なっています
1. パッケージをクローン・ビルド
mkdir -p ~/ros2_ws/src
cd ~/ros2_ws/src
git clone https://github.com/Slamtec/sllidar_ros2.git
cd ~/ros2_ws/
source /opt/ros/humble/setup.bash
colcon build --symlink-install
2. 権限を付与
ls -l /dev | grep ttyUSB
sudo chmod 666 /dev/ttyUSB0
3. Rvizで確認
source ~/ros2_ws/install/setup.bash
ros2 launch sllidar_ros2 view_sllidar_n_launch.py
[n] は使うLiDARの種類に依存します(今回の場合はc1)
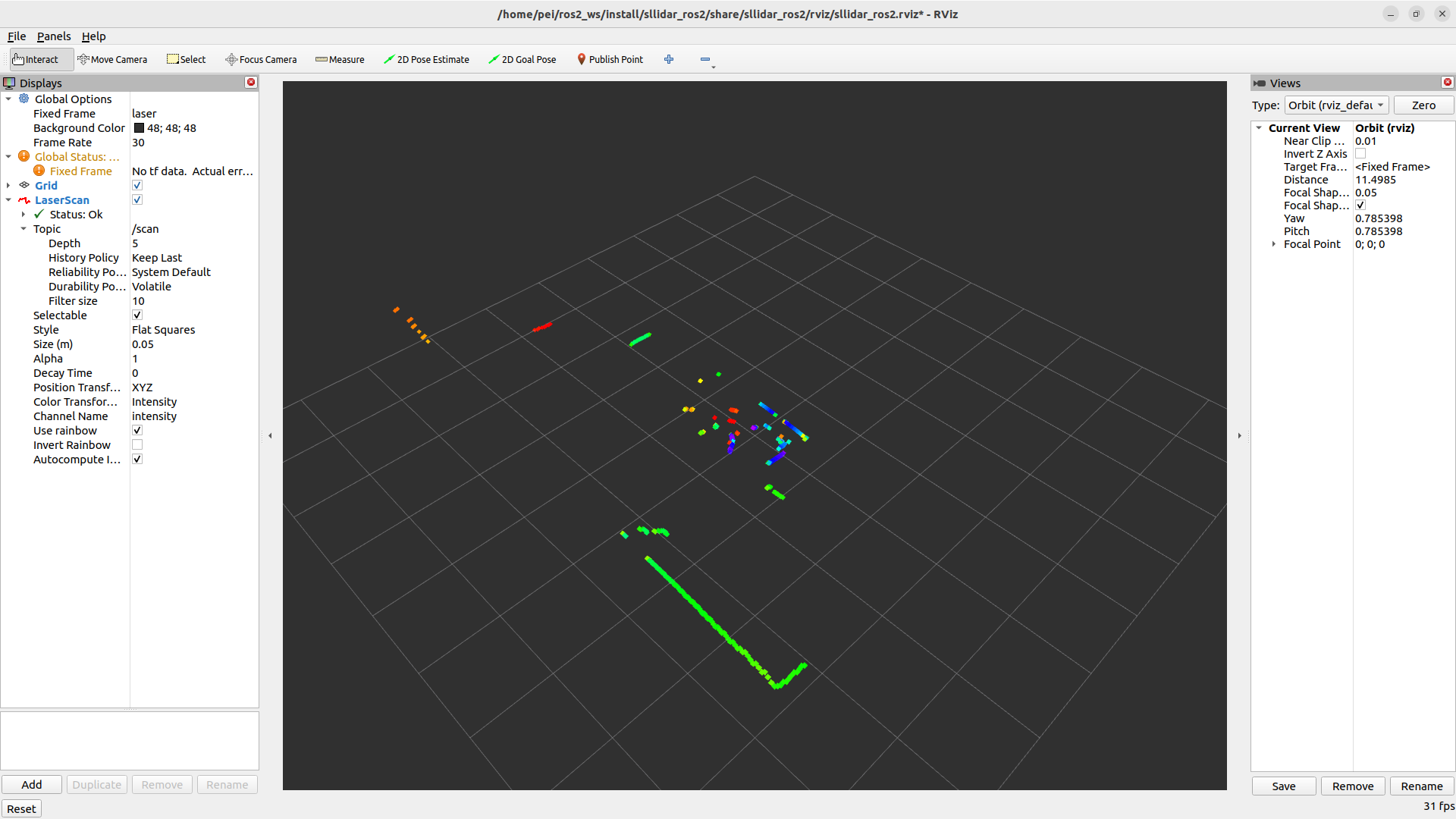
以下のように点群が表示されればOKです
謝辞
この取り組みは株式会社GxP(グロースエクスパートナーズ)様のサポートを受けて実施しています。貴重なアドバイスやロボットに必要な機材の支援をいただきました。心より感謝申し上げます。