はじめに
動作環境
Ubuntu 22.04
ROS2 humble
Witmotion IMU

↓ 説明書
手順
1. パッケージをクローン・ビルド
Rvizで表示させるために元のパッケージを一部改変しました
mkdir -p ~/ros2_ws/src
cd ~/ros2_ws/src
git clone https://github.com/Arcanain/bwt901cl_pkg.git
cd ~/ros2_ws/
source /opt/ros/humble/setup.bash
colcon build --packages-select bwt901cl_pkg
元のパッケージ
2. 権限を付与
IMUをPCに接続し権限を付与します
lsusb
dmesg | grep tty
sudo chmod 666 /dev/ttyUSB0
dmesg | grep tty で上手くいかない場合は2-1, 2-2を参照してください
2-1. アクセス制限を解除[1]

このような表示が出た場合は以下のコマンドを実行してください
sudo touch /etc/sysctl.d/dmesg.conf
sudo nano /etc/sysctl.d/dmesg.conf
kernel.dmesg_restrict=0 ※ファイルに書き込む
sudo /sbin/sysctl --system
2-2. 妨害パッケージを削除[2]

このような表示が出た場合は以下のコマンドを実行してください
sudo apt remove brltty
sudo udevadm control --reload
一番下に新たな行が追加されればOKです

3. Rvizで確認
権限を付与したら起動させます
source ~/ros2_ws/install/setup.bash
ros2 run bwt901cl_pkg imu_bwt901cl
success! がでればOKです

次にRvizで可視化してみます
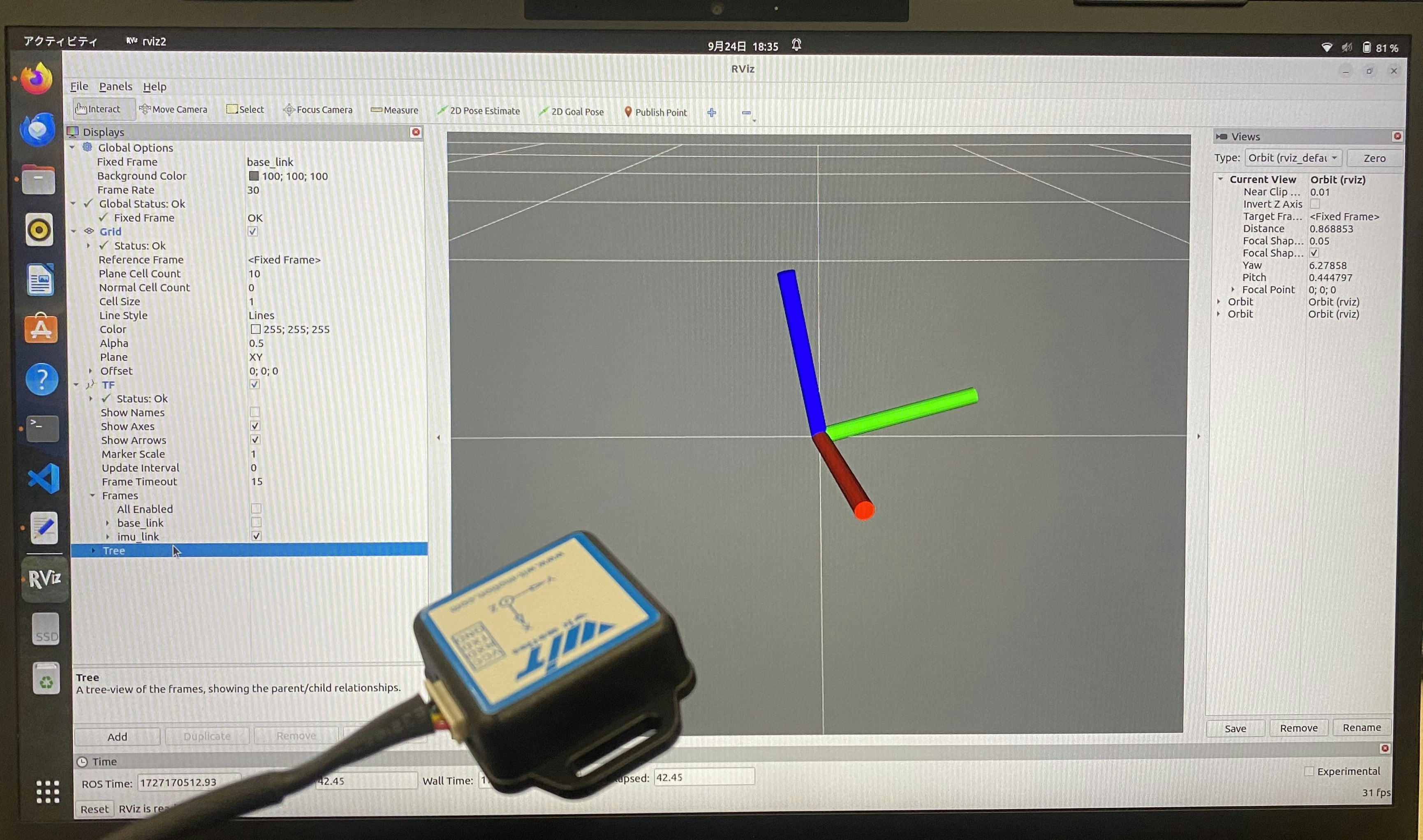
別ウィンドウでRvizを立ち上げ、以下の通りにRvizの設定を変更してください
rviz2
・ [Fixed Frame] を [base_link] に設定する
・ [Add] から [TF] を追加し、[Frames] 内の [imu_link] にチェックをいれる
以下のような画面が表示されればOKです
3軸がIMUの動きと連動します
キャリブレーションについて
準備中
参考文献
[1] https://pyopyopyo.hatenablog.com/entry/2019/02/15/023159
[2] https://qiita.com/74th/items/f46bccd67b2ed6fc867f
謝辞
この取り組みは株式会社GxP(グロースエクスパートナーズ)様のサポートを受けて実施しています。貴重なアドバイスやロボットに必要な機材の支援をいただきました。心より感謝申し上げます。