目標
- OpenPoseの学習済みモデルをロードできるようになる
- OpenPoseの推論をできる
注意 本稿では扱わないこと
- 画像データセットから学習済みモデルを作成する
- パラメータをチューニングする
環境構築
conda 4.3.14
macos mojave
エラー
cv2がないエラー
conda install -c conda-forge opencv
torchvisionがないエラー
conda install torchvision -c pytorch
公式サイト
https://github.com/pytorch/vision
(できなくてpip installしてしまった。改善策を知りたい)
コード
パッケージインポート
from PIL import Image
import cv2
import numpy as np
from matplotlib import cm
import matplotlib.pyplot as plt
%matplotlib inline
import torch
学習済みモデルをロード
学習済みモデルは公開されているので、別途ダウンロードしておく。
from utils.openpose_net import OpenPoseNet
# 学習済みモデルと本章のモデルでネットワークの層の名前が違うので、対応させてロードする
# モデルの定義
net = OpenPoseNet()
# 学習済みパラメータをロードする
net_weights = torch.load(
'./weights/pose_model_scratch.pth', map_location={'cuda:0': 'cpu'})
keys = list(net_weights.keys())
weights_load = {}
# ロードした内容を、本書で構築したモデルの
# パラメータ名net.state_dict().keys()にコピーする
for i in range(len(keys)):
weights_load[list(net.state_dict().keys())[i]
] = net_weights[list(keys)[i]]
# コピーした内容をモデルに与える
state = net.state_dict()
state.update(weights_load)
net.load_state_dict(state)
print('ネットワーク設定完了:学習済みの重みをロードしました')
- ここで、重みがオンラインでロードされるために多少時間がかかる。
画像の前処理
test_image = './data/04-drunk-train.jpg'
oriImg = cv2.imread(test_image) # B,G,Rの順番
# BGRをRGBにして表示
oriImg = cv2.cvtColor(oriImg, cv2.COLOR_BGR2RGB)
plt.imshow(oriImg)
plt.show()
# 画像のリサイズ
size = (368, 368)
img = cv2.resize(oriImg, size, interpolation=cv2.INTER_CUBIC)
# 画像の前処理
img = img.astype(np.float32) / 255.
# 色情報の標準化
color_mean = [0.485, 0.456, 0.406]
color_std = [0.229, 0.224, 0.225]
preprocessed_img = img.copy()[:, :, ::-1] # BGR→RGB
for i in range(3):
preprocessed_img[:, :, i] = preprocessed_img[:, :, i] - color_mean[i]
preprocessed_img[:, :, i] = preprocessed_img[:, :, i] / color_std[i]
# (高さ、幅、色)→(色、高さ、幅)
img = preprocessed_img.transpose((2, 0, 1)).astype(np.float32)
# 画像をTensorに
img = torch.from_numpy(img)
# ミニバッチ化:torch.Size([1, 3, 368, 368])
x = img.unsqueeze(0)
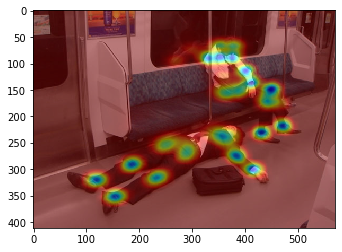
姿勢推定部分
# OpenPoseでheatmapsとPAFsを求めます
net.eval()
predicted_outputs, _ = net(x)
# 画像をテンソルからNumPyに変化し、サイズを戻します
pafs = predicted_outputs[0][0].detach().numpy().transpose(1, 2, 0)
heatmaps = predicted_outputs[1][0].detach().numpy().transpose(1, 2, 0)
pafs = cv2.resize(pafs, size, interpolation=cv2.INTER_CUBIC)
heatmaps = cv2.resize(heatmaps, size, interpolation=cv2.INTER_CUBIC)
pafs = cv2.resize(
pafs, (oriImg.shape[1], oriImg.shape[0]), interpolation=cv2.INTER_CUBIC)
heatmaps = cv2.resize(
heatmaps, (oriImg.shape[1], oriImg.shape[0]), interpolation=cv2.INTER_CUBIC)
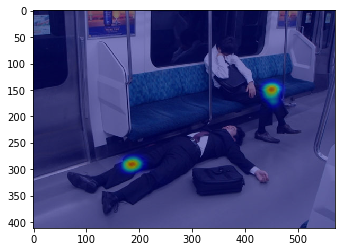
heatmapの表示
heatmapは要は推定される体の部位を示すもの。
"""
// Result for BODY_25 (25 body parts consisting of COCO + foot)
// const std::map<unsigned int, std::string> POSE_BODY_25_BODY_PARTS {
// {0, "Nose"},
// {1, "Neck"},
// {2, "RShoulder"},
// {3, "RElbow"},
// {4, "RWrist"},
// {5, "LShoulder"},
// {6, "LElbow"},
// {7, "LWrist"},
// {8, "MidHip"},
// {9, "RHip"},
// {10, "RKnee"},
// {11, "RAnkle"},
// {12, "LHip"},
// {13, "LKnee"},
// {14, "LAnkle"},
// {15, "REye"},
// {16, "LEye"},
// {17, "REar"},
// {18, "LEar"},
// {19, "LBigToe"},
// {20, "LSmallToe"},
// {21, "LHeel"},
// {22, "RBigToe"},
// {23, "RSmallToe"},
// {24, "RHeel"},
// {25, "Background"}
// };
"""
# 25の全て
part = 0
while part <= 25:
heat_map = heatmaps[:, :, part] # 6は左肘
heat_map = Image.fromarray(np.uint8(cm.jet(heat_map)*255))
heat_map = np.asarray(heat_map.convert('RGB'))
# 合成して表示
blend_img = cv2.addWeighted(oriImg, 0.5, heat_map, 0.5, 0)
plt.imshow(blend_img)
plt.show()
part += 1
体の部位ごとの推定の出力結果
鼻

首

右肩

右肘

右手首

左肩

左肘

左手首

腰の中心

右膝
右足首

左の腰

左膝

左足首





姿勢推定結果の表示
from utils.decode_pose import decode_pose
_, result_img, _, _ = decode_pose(oriImg, heatmaps, pafs)
# 結果を描画
plt.imshow(oriImg)
plt.show()
plt.imshow(result_img)
plt.show()

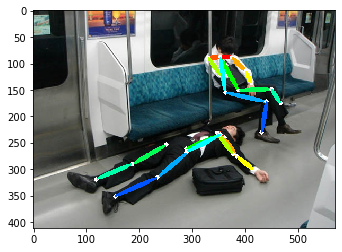
出力結果の評価
推定結果は間違っている部分がある。
部位ごとのヒートマップを見ることで、推定結果がどのように誤解している結果、そうなったのか理解できる。
参考文献