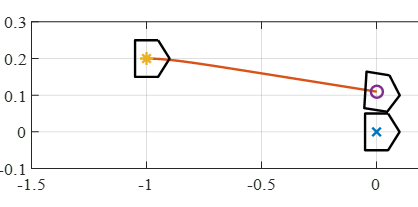
MATLABでロボットのTrajectoryとかを示す時にただの線ではつまらないので以下のようなホームベース型の図形を作成したほうが視覚的にわかりやすいでしょう。
以下切り抜きにて失礼:
しかし,探してもそれらしいプログラムが落ちていないので自作しました。
自作関数
ちなみに日本語の”ホームベース”は英語では"baseball base"というのが自然そうです。
%%%
% Input: (x,y,theta) of point and baseballbase size
% Output: handle of plot
%%%
function handle = plot_baseballbase(x,y,theta,hsize)
d = hsize/2;
pts = [d 2*d d -d -d d;d 0 -d -d d d];
R = [cos(theta) -sin(theta); sin(theta) cos(theta)];
rpts = R*pts;
handle = plot(x+rpts(1,:),y+rpts(2,:),'k')
end
TODO
- 本当はオプションを渡せるようにしたかったんですが…MATLABでデフォルト引数が使えないため,使い勝手がすこぶる悪い感じになりうる…
if nargin==4
option = 'default value';
end