ラジコンバスを1から設計
開発の経緯
日本では様々なラジコンカーが発売されているが、大型車のラジコンはあまり多くない。過去に発売された、アオシマ製のドアが開閉するラジコンを持っているが、ギミックは面白いものの、走行性能は本物と比べると劣る。この度、バスの動きに重点を置いたラジコンを作りたいと思い、設計を始めた。また、制御機器には以前友人から頂いた最新の「Raspberry Pi4」を使用し、人間の操作だけでなく、カメラ画像を使用した自動運転や危険予測にも対応させる。昨今、バスの運転士の不足が問題となっており、コンピューターによる自動運転は大変重要になってきている。自動運転のためには画像認識が大切である。今回のプロジェクトを経て、自動運転や画像認識の理解を深めたいと思う。なお走行の実験をすることが主な目的であり、見た目はあまり重視していない。
[画像]アオシマ製のラジコンバスと自作のラジコンバス

車体は未定となっており、今回は実験のため東京都交通局の都バスのペーパークラフトを使用した。制御機器の都合上、天井は取り付けていない。
都バスペーパークラフト
走行動画(テスト)
YouTube
回路図
Raspberry Pi4の回路ソフトで設計した。
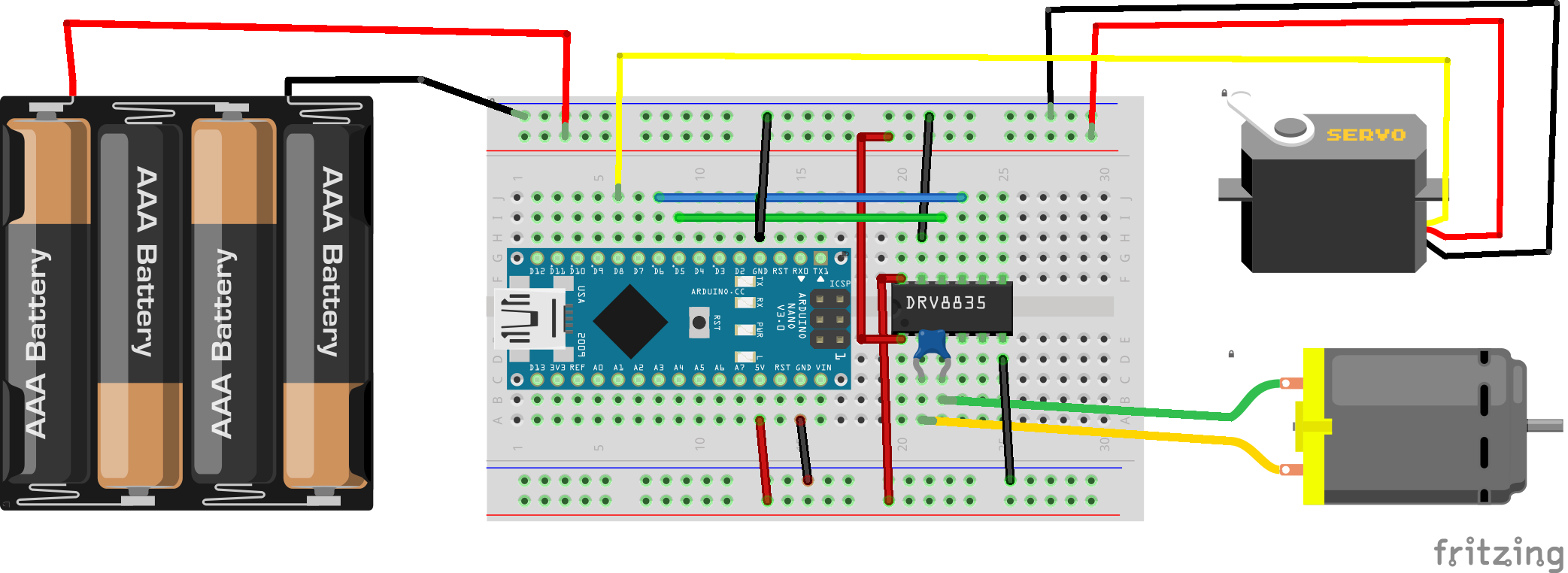
DRV8835の向きは画像左側が素子の上側(VM/VCC)、右側が素子の下側(GND/BIN2)である。向きに注意されたい。
車体設計
製図
今回はリアルな動きを再現するため、いすゞエルガのサイトや三菱エアロスターのサイトを参考にして寸法を決定した。ステアリング部は特にこだわり、いすゞのサイトに載っていたタイヤの切れ角53°を意識して製作した。スケールはタイヤのサイズより決定し、およそ1/40である。タミヤのユニバーサルボードを用いて製作した。
車体裏側
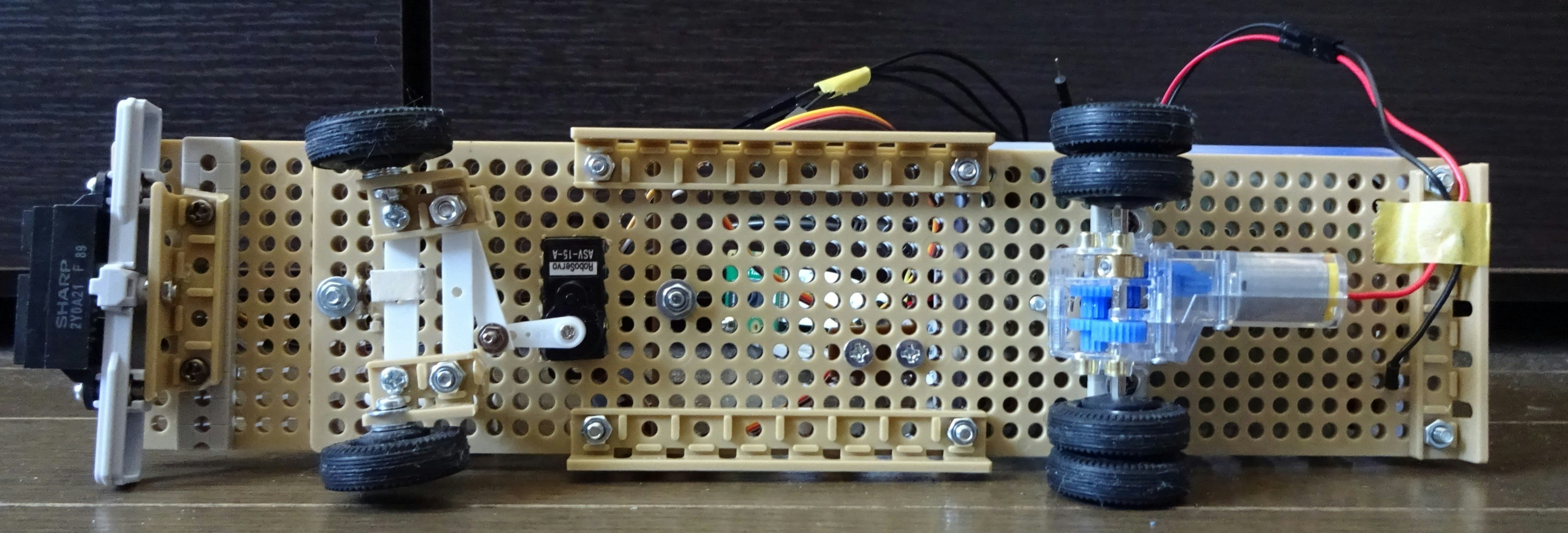
この画像では前方にシャープ製の測距モジュールを取り付けている。(改めて記述予定)
ステアリング
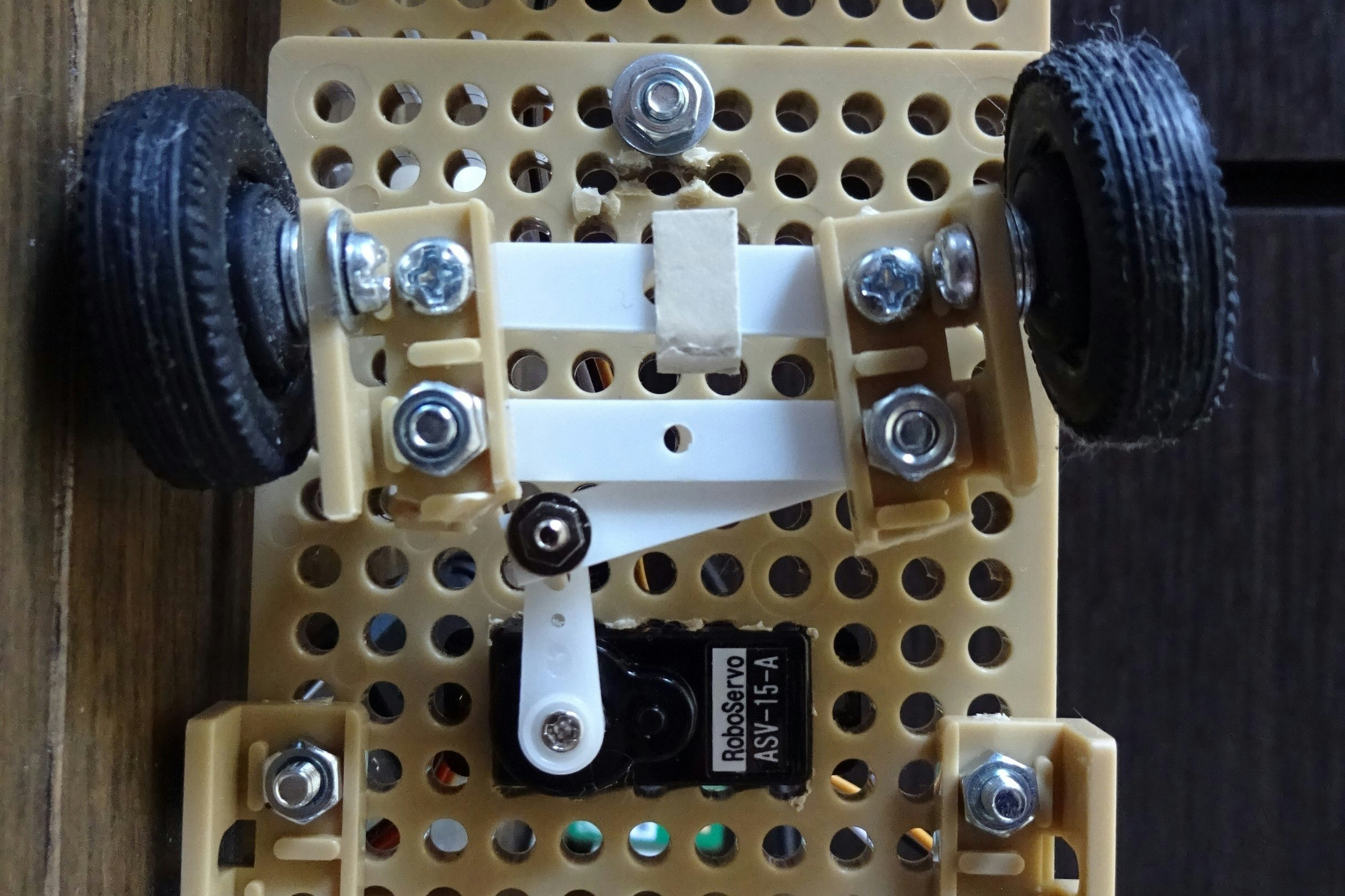
タミヤの部品やプラ板を加工したパーツを組み合わせて、ステアリングのスライダ機構を製作した。外側と内側で切れ角を変化させる機構はつけていない。タイヤが設計した角度よりも曲がりすぎないように、紙で作った仮のパーツを挟んでいる。
後輪部
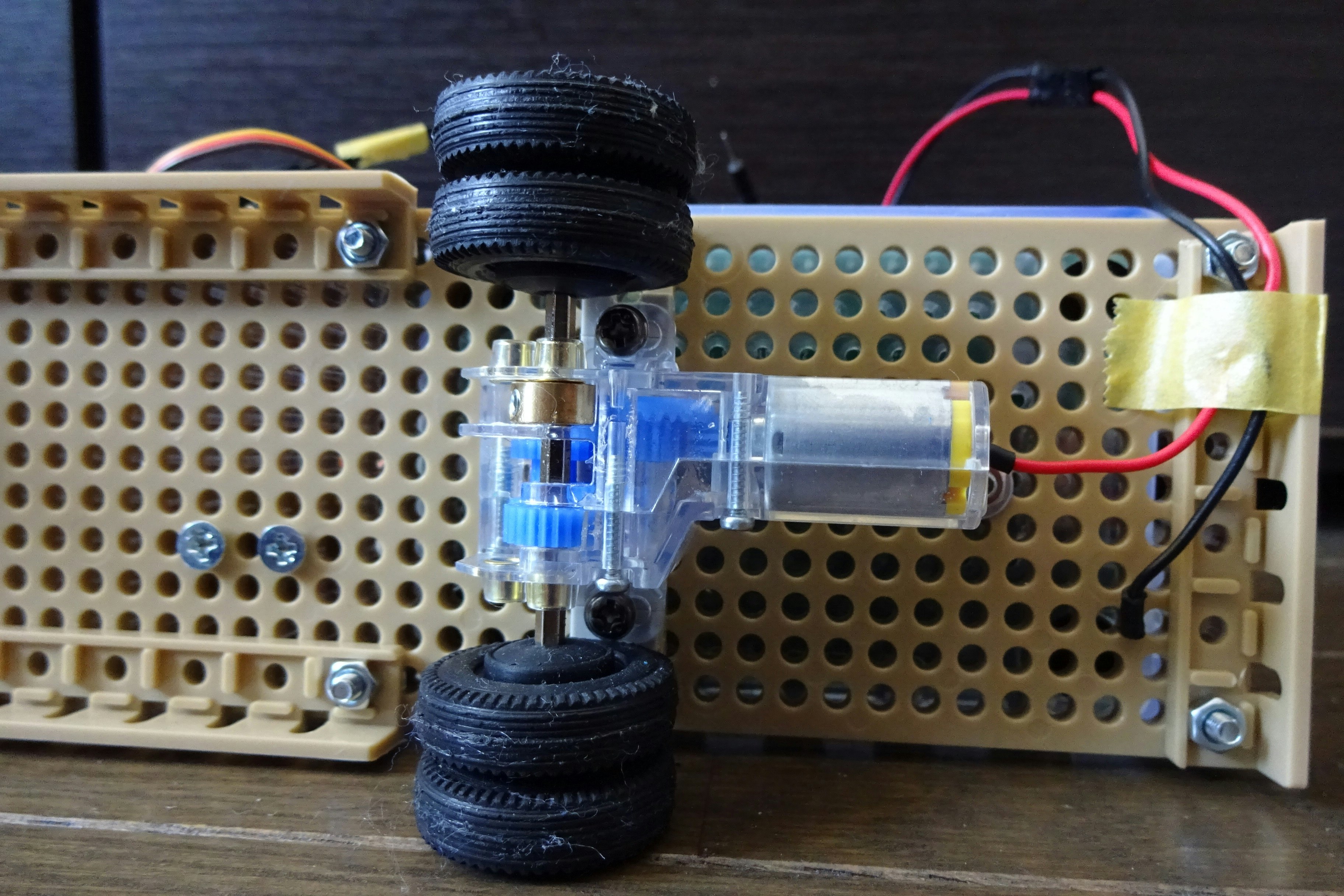
タミヤのギアボックスを取り付けただけである。今回はサスペンションやデフギアなど複雑な機構は取り入れていない。
使用材料
[ハードウェア]
・Raspberry Pi4 4GBモデル
・Arduino nano 互換モデル
ラズパイは主に通信と画像処理に使用し、回路の制御はArduinoに任せることにした。ラズパイとArduinoは「Pyserial」のライブラリを用いて行った。
[材料]
・タミヤ ユニバーサルプレートセット
・タミヤ ユニバーサルアームセット
・タミヤ ユニバーサルプレート用スライドアダプター
・タミヤ ミニモーター標準ギヤボックス (8速)
・タミヤ 1.5mmプラ板
・M2/M3ネジ いろいろな種類があるとよい。
・ブレットボード
・ジャンパ線
・積層セラミックコンデンサ0.1[μF]
・浅草ギ研 RCサーボ ASV-15 タイプA
・DRV8835使用ステッピング&DCモータドライバモジュール
・朝日電器 ELPA エルパHK-M25H [タイヤ25mm 2個入]
→探した中で最もバスのタイヤに近いと思う。
おわりに
今後も自動運転に向けた開発を続けていく。