概要
OpenPoseをROSで使いたかったわけですが、自分が欲しいパッケージがまだ無かったようなので作りました。
![]()
![]()
![]() my github
my github ![]()
![]()
![]()
ROSのOpenPoseドライバとしてはros-openposeがありますが、これは関節ごとの画面座標を出力するものでした。
自作パッケージはros-openposeのデータをより機械学習で使いやすいように関節角度に変換してTopicで投げるようにしたものです。
例
persons:
-
layout:
dim: []
data_offset: 0
data: [22, 0, 0, 56, 76, 0, 25, 29, 1, 0, 0, 0, 0, 34, 0, 0]
-
layout:
dim: []
data_offset: 0
data: [40, 49, 4, 41, 52, 3, 10, 37, 10, 41, 8, 0, 0, 8, 0, 0]
num: 2
二人の人間が写っている時のTopic
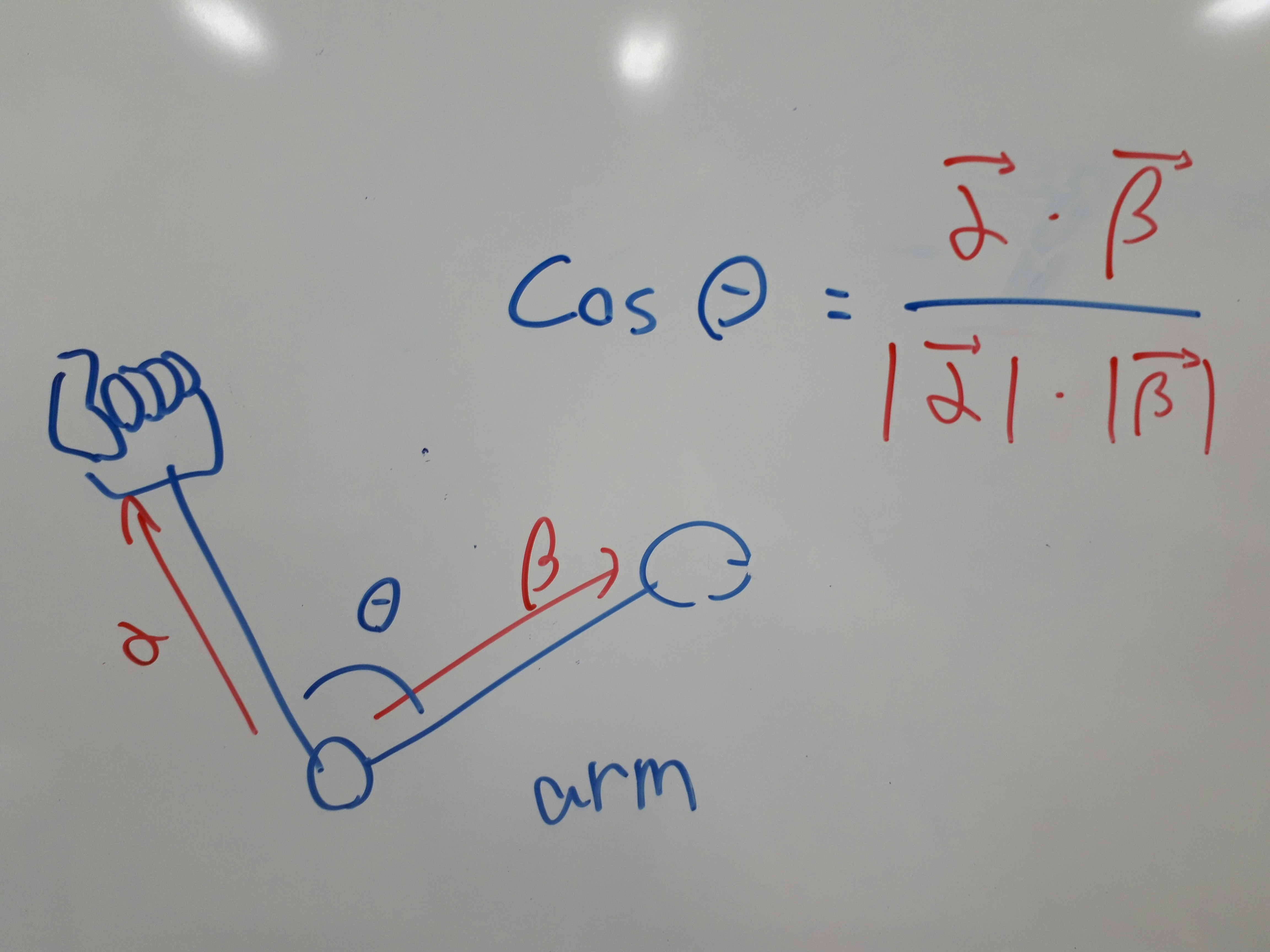
実装した関節角度の計算方法
例えば肘の関節角度が欲しい場合、肘から手首と肩に向かってそれぞれベクトルが得られます。
この時、肘の関節角は2つのベクトルの内積から計算が可能です。
これを主な関節に対して行うことで関節角度を取得しています。
def convertFormat2Vector(self, msg):
'''
@param msg : ros-openpose format
@return output : array (16dim)
'''
output = np.zeros((0, 16))
for person in msg.persons:
angles = []
'''
confidence: 0.694853901863, part_id: 17
x: 368
y: 341
'''
for p in parts_id_pair:
x0 = person.body_part[p[0]].x
y0 = person.body_part[p[0]].y
x1 = person.body_part[p[1]].x
y1 = person.body_part[p[1]].y
x2 = person.body_part[p[2]].x
y2 = person.body_part[p[2]].y
if all([x0, x1, x2, y0, y1, y2]):
u = np.array( [ x1 - x0, y1 - y0])
v = np.array( [ x2 - x0, y2 - y0])
angle = np.round(self.innerProduct(u, v))
angles.append(angle)
else:
angles.append(self.MISSING_VALUE)
print(angles)
output = np.vstack((angles, output))
print(output.shape)
return output
def innerProduct(self, u, v):
'''
calcJointAngle
'''
i = np.inner(u, v)
n = np.linalg.norm(u) * np.linalg.norm(v)
c = i / n
deg = np.rad2deg(np.arccos(np.clip(c, -1.0, 1.0)))
return deg
欠損値の扱い
カメラから体の一部が消えた時は欠損値が出るわけですが、
とりあえずその場合はデフォルトで0が入るようになっています。
一応変えたい場合はlaunchのrosparamをイジればいいように実装されています。
Topicの説明
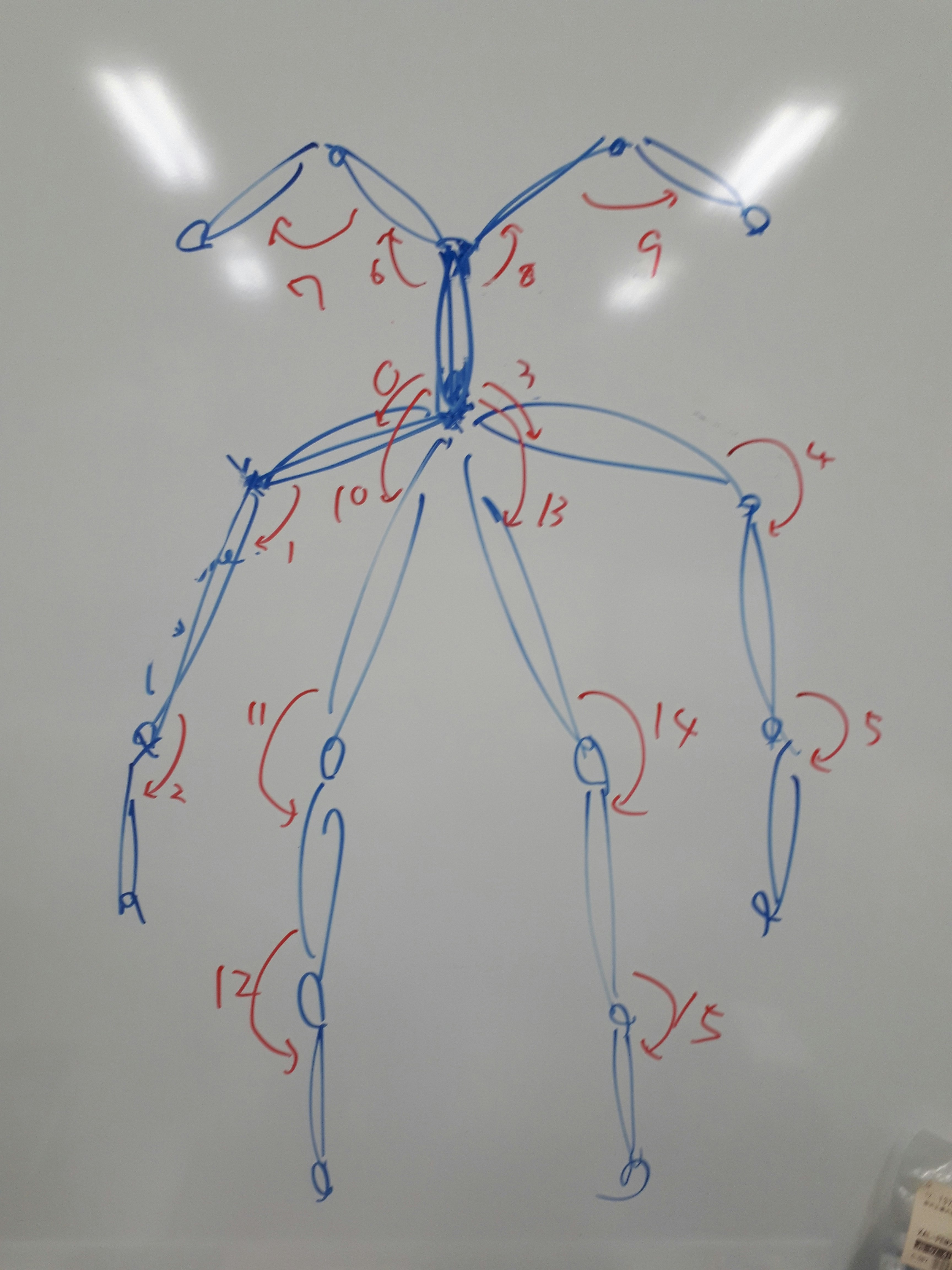
Listで16個の値を投げています。
単位はDegreeで、16個の値は下の図のIndexと対応します。