概要
GPSで自動走行する、コンテストがある。
実機を借りて、アプリから操作する部門がある。
実機は無いので、シュミレータを作ってみた。
環境
windows xp
visualstudio 2010
Android 4.2.2
動画
写真
Bluetoothの準備
amazonから、以下のモジュールを調達。

パターンが狭くて、半田付けに苦労したが、何とか電源は供給できた。
Nexus7(2012)とペアリングは、「202SH」と表示はでるが、できなかった。
Bluetoohの準備2
上のモジュール、見たことあるなと思っていたら、OBDスキャナのELM327についてた。
Nexus7でペアリング、できてた。
ELM327をばらして、モジュールを取り出したが、電源ラインがショートしてる。
Bluetoothの準備3
USBのbluetoothトングルを使う。バージョンは2.0
シリアルポートがある。IVT BLUESOLEILを使う。バージョンは1.4
COM14で認識した。
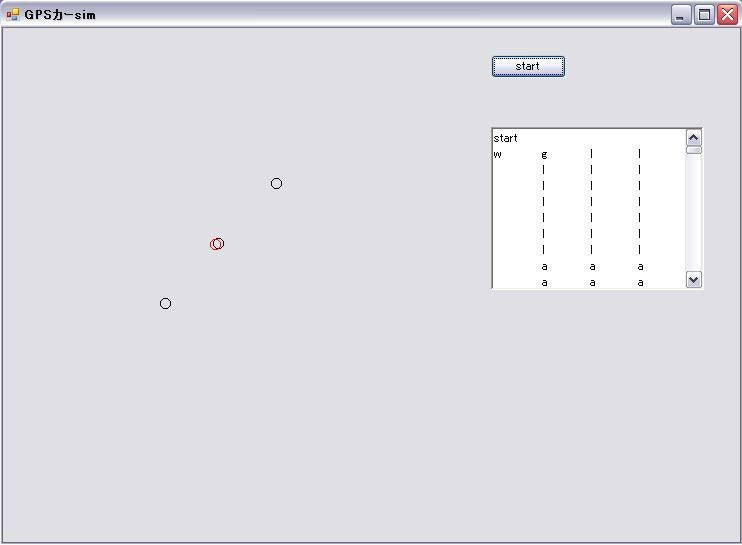
シュミレータのプログラム
c#を使いました。
シリアルポートから、コマンドを読み込んで、画面の表示と100ms毎の通信を行います。
アンドロイド、アプリ
ペアリングされた、デバイスをスピナーで選択させます。
スタートを押せば、「w」「g」を送って、位置情報をパースしながら、
ステートマシンでウェイポイントを切り替えて、自動操縦します。
嵌まった点
arduinoの精度がfloatなので、最初、floatで作成したが、位置がずれるので、doubleに書き換えた。
以上