概要
cscの作法、調べてみた。
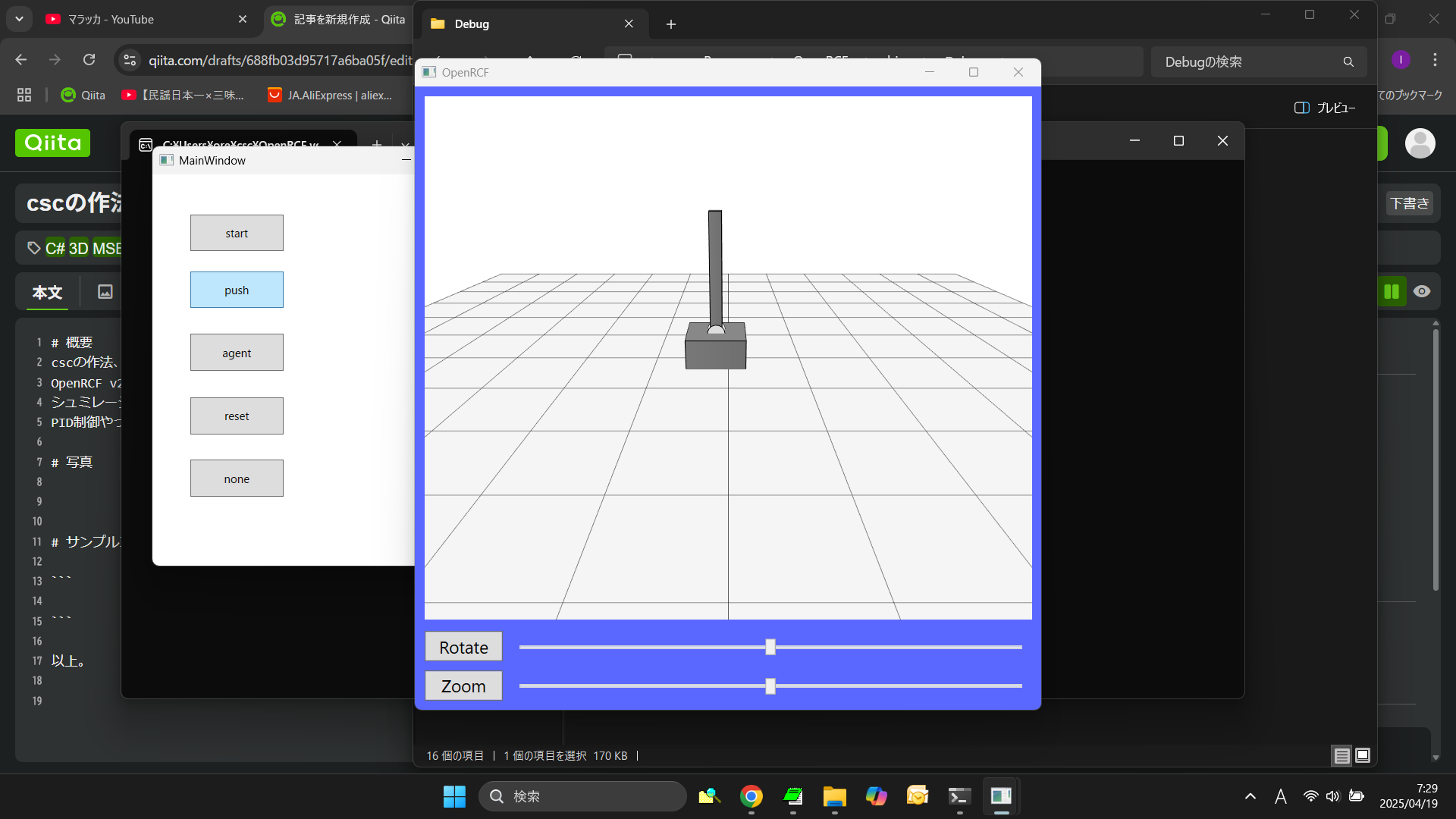
OpenRCF v2.8、見つけたので、windows11で、MSbuildしてみた。
シュミレーションやってみた。
PID制御やってみた。
写真
サンプルコード
using System;
using System.Windows;
using OpenRCF;
using Vector = OpenRCF.Vector;
using OpenTK;
using OpenTK.Graphics;
using OpenTK.Graphics.OpenGL;
namespace OpenRCF
{
class InvertedPendulum {
private readonly static float g = 9.80665f;
private Cuboid Pole = new Cuboid(0.1f, 0.1f, 0.8f);
private Pillar Joint = new Pillar();
private Cuboid Base = new Cuboid(0.4f, 0.4f, 0.2f);
private float poleLength = 0.5f;
private float poleMass = 0.2f;
private float baseMass = 0.2f;
private bool isDynamicsEnabled = false;
private void CalcDynamics() {
float CosTh = (float) Math.Cos(Theta);
float SinTh = (float) Math.Sin(Theta);
float force = Force - PoleMass * g * CosTh * SinTh;
Velocity += SamplingTime * force / (BaseMass + PoleMass);
Position += SamplingTime * Velocity;
Joint.Position[0] = Position;
float poleForce = PoleMass / (BaseMass + PoleMass) * force;
Torque = 0.5f * poleLength * (PoleMass * g * SinTh - poleForce * CosTh);
Omega += SamplingTime * Torque / Inertia;
Theta += SamplingTime * Omega;
if (Theta > 1.6)
return;
if (Theta < -1.6)
return;
Joint.Rotate.SetRy(Theta);
}
public float Inertia {
get;
private set;
}
public float Position,
Velocity;
public float Theta,
Omega,
Torque;
public float Force;
public float samplingTime = 0.05f;
public float SamplingTime {
get {
return samplingTime;
}
set {
if (isDynamicsEnabled)
{
Console.WriteLine("Error: SamplingTime setting must be before StartDynamics().");
}
else if (value < 0.001f)
{
Console.WriteLine("Error: SamplingTime is too small.");
}
else
{
samplingTime = value;
}
}
}
public float PoleLength {
get {
return poleLength;
}
set {
poleLength = value;
Inertia = 0.25f * poleMass * poleLength * poleLength;
Pole.SetSize(0.1f * poleLength, 0.1f * poleLength, poleLength);
Pole.SetPositionOffset(0, 0, 0.5f * Pole.SizeZ);
Joint.Radius = 0.075f * poleLength;
Joint.Height = 0.12f * poleLength;
}
}
public float PoleMass {
get {
return poleMass;
}
set {
if (0 < value)
{
poleMass = value;
Inertia = 0.25f * poleMass * poleLength * poleLength;
}
else
{
Console.WriteLine("Error: Mass must be greater than 0.");
}
}
}
public float BaseMass {
get {
return baseMass;
}
set {
if (0 < value)
baseMass = value;
else
Console.WriteLine("Error: Mass must be greater than 0.");
}
}
public InvertedPendulum(float poleLength = 0.8f) {
PoleLength = poleLength;
Pole.Position = Joint.Position;
Pole.Rotate = Joint.Rotate;
Base.Position = Joint.Position;
Base.SetPositionOffset(0, 0, -0.5f * Base.SizeZ);
Joint.SetRotateOffset(0.5f * (float) Math.PI, 0, 0);
Joint.Color.SetLightGray();
Joint.Position[2] = Base.SizeZ;
}
public void SetBaseSize(float sizeX, float sizeY, float sizeZ) {
Base.SetSize(sizeX, sizeY, sizeZ);
Base.SetPositionOffset(0, 0, -0.5f * Base.SizeZ);
Joint.Position[2] = Base.SizeZ;
}
public void Draw() {
Pole.Draw();
Joint.Draw();
Base.Draw();
}
public void StartDynamics() {
if (isDynamicsEnabled == false)
{
Parallel.RunEndless(CalcDynamics, (uint) (1000 * SamplingTime));
isDynamicsEnabled = true;
}
else
{
Console.WriteLine("Warning: Dynamics is already enabled.");
}
}
public void Reset() {
Force = 0;
Position = 0;
Velocity = 0;
Theta = 0;
Omega = 0;
isDynamicsEnabled = false;
}
}
partial class MainWindow: Window {
InvertedPendulum InvertedPendulum = new InvertedPendulum();
float err2 = 0;
float err = 0;
float P = 0;
float I = 0;
float D = 0;
void Agent() {
float Kp = 10.0f;
float Ki = 0.2f;
float Kd = 0.2f;
float dt = 0.05f;
P = 0 + InvertedPendulum.Theta;
I += P * dt;
D = (P - err2) / dt;
InvertedPendulum.Force = Kp * P + Ki * I + Kd * D;
err2 = err;
err = P;
}
void Setup() {
InvertedPendulum.PoleLength = 0.8f;
InvertedPendulum.PoleMass = 0.2f;
InvertedPendulum.BaseMass = 0.2f;
Button1.Content = "start";
Button2.Content = "push";
Button3.Content = "agent";
Button4.Content = "reset";
Button5.Content = "none";
}
void Loop() {
}
void Draw() {
InvertedPendulum.Draw();
}
void Button1_Click(object sender, RoutedEventArgs e) {
InvertedPendulum.StartDynamics();
}
void Button2_Click(object sender, RoutedEventArgs e) {
InvertedPendulum.Theta += 0.01f;
}
void Button3_Click(object sender, RoutedEventArgs e) {
Parallel.RunEndless(Agent, 50);
}
void Button4_Click(object sender, RoutedEventArgs e) {
InvertedPendulum.Reset();
}
void Button5_Click(object sender, RoutedEventArgs e) {
InvertedPendulum.Force = 0.01f;
}
}
}
以上。