概要
cscの作法、調べてみた。
OpenRCF v2.8、見つけたので、windows11で、MSbuildしてみた。
練習問題やってみた。
練習問題
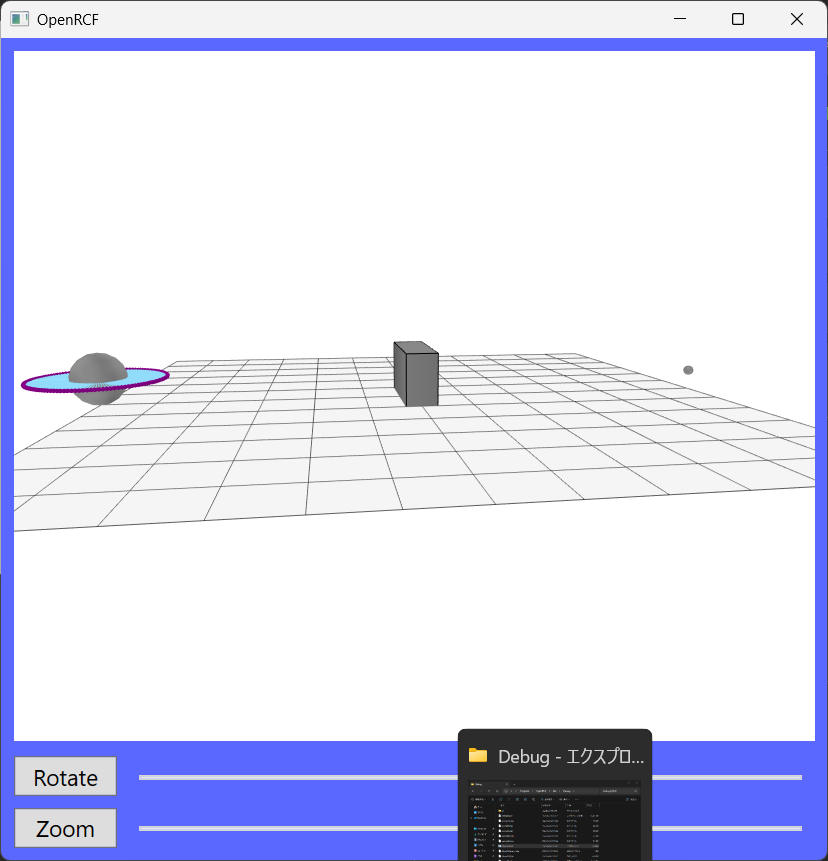
Lidarで、障害物を回避せよ。
写真
サンプルコード
using System;
using System.Windows;
using OpenRCF;
using Vector = OpenRCF.Vector;
using OpenTK;
using OpenTK.Graphics;
using OpenTK.Graphics.OpenGL;
namespace OpenRCF
{
partial class MainWindow: Window {
Sphere rover = new Sphere(0.25f);
LiDAR lidar = new LiDAR();
Cuboid wall = new Cuboid();
Sphere p1 = new Sphere(0.05f);
float[] point1 = new float[3] {3.0f, 0, 0.2f};
bool isMoved = false;
class Agent {
float err2 = 0;
float err = 0;
float P = 0;
float I = 0;
float D = 0;
public float get_action(float setPoint, float input) {
float Kp = 0.02f;
float Ki = 0.002f;
float Kd = 0.002f;
float dt = 0.05f;
this.P = setPoint - input;
this.I += this.P * dt;
this.D = (this.P - this.err2) / dt;
float u = Kp * this.P + Ki * this.I + Kd * this.D;
this.err2 = this.err;
this.err = this.P;
return u;
}
}
float getDistance(float x, float y, float x2, float y2) {
float distance = (float) Math.Sqrt((x2 - x) * (x2 - x) + (y2 - y) * (y2 - y));
return distance;
}
Agent agent0 = new Agent();
Agent agent1 = new Agent();
void to(float[] point) {
float x = rover.Position[0];
float y = rover.Position[1];
float u0 = agent0.get_action(point[0], x);
float u1 = agent1.get_action(point[1], y);
rover.Position[0] += u0;
rover.Position[1] += u1;
}
void Setup() {
rover.Position[0] = -3.0f;
rover.Position[2] = rover.Radius;
p1.Position = point1;
wall = new Cuboid(0.3f, 1.0f, 0.5f);
wall.Position[2] = 0.25f;
lidar.Position.Follow(rover.Position);
lidar.Rotate.Follow(rover.Rotate);
lidar.SetPositionOffset(0, 0, 0);
lidar.LaserLength = 0.6f;
float[][] pointCloud = lidar.PointCloud(wall);
Button1.Content = "start";
Button2.Content = "reset";
Button3.Content = "none";
Button4.Content = "none";
Button5.Content = "none";
}
void Loop() {
if (isMoved)
{
float[][] pointCloud = lidar.PointCloud(wall);
if (pointCloud[63][0] < 0.59f)
{
rover.Position[1] += 1.2f;
return;
}
Console.WriteLine(pointCloud[73][0]);
float dis = getDistance(point1[0], point1[1], rover.Position[0], rover.Position[1]);
if (dis < 0.3)
{
isMoved = false;
return;
}
to(point1);
if (wall.IsCollided(rover))
{
rover.Color.SetRed();
isMoved = false;
}
else
rover.Color.SetGray();
}
}
void Draw() {
rover.Draw();
wall.Draw();
p1.Draw();
lidar.Draw();
}
void Button1_Click(object sender, RoutedEventArgs e) {
isMoved = true;
}
void Button2_Click(object sender, RoutedEventArgs e) {
rover.Position[0] = -3.0f;
rover.Position[1] = 0;
rover.Position[2] = rover.Radius;
rover.Color.SetGray();
float[][] pointCloud = lidar.PointCloud(wall);
isMoved = false;
}
void Button3_Click(object sender, RoutedEventArgs e) {
}
void Button4_Click(object sender, RoutedEventArgs e) {
}
void Button5_Click(object sender, RoutedEventArgs e) {
}
}
}
以上。