解像度
ZED2i
2K at 15 FPS with Output resolution side-by-side of 2x(2208x1242)
1080p at 30 or 15 FPS with Output resolution side-by-side of 2x(1920x1080)
720p at 60, 30 or 15 FPS with Output resolution side-by-side of 2x(1280x720)
376p at 100, 60, 30 or 15 FPS with Output resolution side-by-side of 2x(672x376)
RealSense D435
Depth 解像度と FPS 1280 X 720
ReasSense D455
Depth 解像度と FPS: 1280x720 upto 90FPS
視野角
ZED2i
Field of View
110°(H) x 70°(V) x 120°(D) max. (for 2.1mm)
72°(H) x 44°(V) x 81°(D) max. (for 4mm)
D435
Depth 視野85.2 x 58
D455
Depth 視野86x57
基線長
ZED2i
Baseline 120 mm (4.72’’)
RealSense D435 (注:コメントを参照)
50mm
RealSense D455
95mm
Depthの範囲
ZED2i
Depth Range Max
0.3m to 20m (1ft to 65ft) with 2.1 mm lens
1.5m to 35m (4.9ft to 114.8ft) with 4 mm lens
Ideal Range
0.3m to 12m (1ft to 39ft) with 2.1 mm lens
1.5m to 20m (5ft to 65ft) with 4 mm lens
D435
動作範囲 (最小 - 最大): ~.3m - 3m
D455
動作範囲 (最小 - 最大): .6m-6m
マシンビジョン用のカメラとしてみたときの私見(ZED2i と D435の場合の比較)
この文章でのマシンビジョンとは、工場など所定の場所に取り付けられていて、制御された環境での画像計測や画像認識をとを想定しています。ヒューマノイドロボットは想定に含まれていません。
作業距離が3 m 以遠:
この作業距離では、ZED2iだけ。 D435はサポートしていない。
作業距離が0.3 m ~ 3 mの範囲:
この作業距離ならば両方とも候補になる。
- 算出した点の安定性を重視するならば、active stereoであるRealSense D435が優れる(はず)。
- 作業距離が0.3 m ~ 3 mの範囲での、計測点の密度についていうと、ZED2iの方が上回る。
- depth画像での画素とRGB画像での画素の対応付けを優先するならば、ZED2i がよい。どちらもステレオカメラで算出しているため。
作業距離が1.5 m ~ 3 mの範囲:
この作業距離ならば両方とも候補になる。
ZED2iでは以下の焦点距離のものがおすすめになる。
1.5m to 35m (4.9ft to 114.8ft) with 4 mm lens
72°(H) x 44°(V) x 81°(D) max. (for 4mm)
視野角が狭くなるぶん、作業距離上での点の密度が向上する。
- 算出した点の安定性を重視するならば、active stereoであるRealSense D435が優れる(はず)だが、撮影条件の改善などで、ZED2iの動作を安定させるのがいいだろう。
- ZED2iでは、ステレオ平行化済みの左右の画像を取得できるので、ZED-SDKに用意されていないステレオマッチングアルゴリズムを利用するようにプログラムを書くことも可能だ。
より本格的な計測をめざしている場合には
寸法の精度を上げたい場合
- 工場での利用を目的とした産業用の3Dカメラを利用することです。
基線長がZED2iよりも長いカメラで、カメラの画素数が大きく、視野角も狭いものだと、
寸法を計測する精度を上げることが可能になりやすいです。
計測のフレームレートを上げたい場合
- 産業用のカメラだと高いフレームレートを実現するものもあります。
より本格的な計測をめざす場合でも
- 10万円以下の金額で購入できる3Dカメラは、試してみる価値があります。
- RealSenseやZED2iで試してみて、目的を達成できるならばそれでいい。
- 試してみて、どこに課題があるのかが見えてくれば、どういう仕様のカメラを購入するのがよいのかが見えてきます。
- 本格的な計測のためのカメラを、目的が達成できるものを、オーバースペックにならないように購入するのは簡単ではありません。
実験に基づく比較レポート
Depth Accuracy Comparison: Luxonis OAK vs StereoLab™ ZED vs Intel® RealSense™
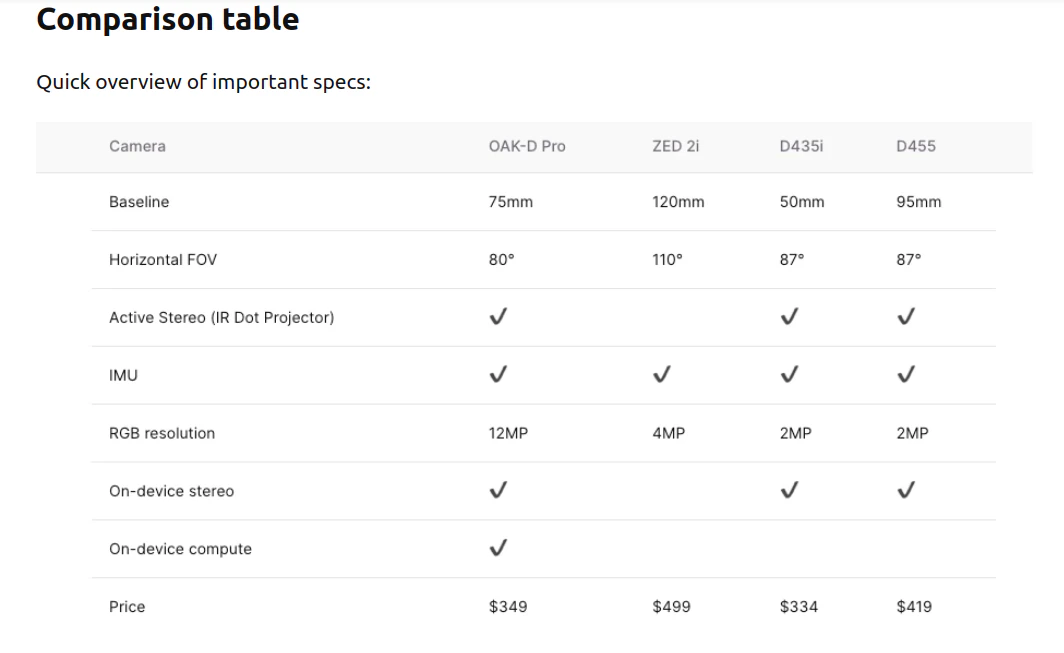
この表でのZED2i は広角になる設定の焦点距離のカメラの場合です。
<7m, <10m は、仕様に示しているOperating Range (Min-Max)~.3m - 3m よりも遠方であることに考えると、RealSenseも頑張っているといえるだろう。