画像系のセンシングでは、ガラスや鏡がある環境での計測は得意としていない。
また画像系のセンシングでは、遅延時間が大きくなりやすい。
動画のフレームレートを 30 fps より大にしていることは稀でである。
データの取得だけで30msかかっている上に、画像の絵作りのための処理(auto white balance, High Danamic Rangeなど)の処理の分だけ遅れた画像が、ISPから取得される。この後に、画像計測処理、画像認識処理が入れば、遅延はもっと増える。
そのため、ぶつからないことを目標に入れると、超音波センサの利用を視野に入れたい。
超音波センサ
- 画像センサに比べ格段に速い。処理が軽い。
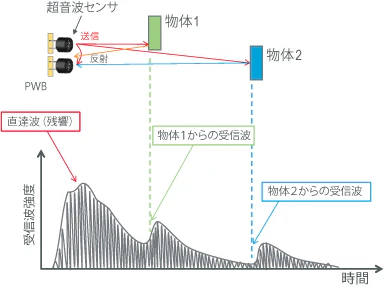
超音波センサは、送波器にから超音波を対象物に向け発信し、その反射波を受波器で受信することにより、対象物の有無や対象物までの距離を検出する機器です。ミリ波センサとも原理は似ています。
超音波はその名の通り、音を使ったセンサのため、超音波の発信から受信までに要した時間と音速との関係を演算することでセンサから対象物までの距離を算出しています。
音波は周波数帯20kHz~とミリ波レーダに対して低いため、直進性が低く計測距離も~10mとなっています。
車両では車のバックソナーや前方のソナーセンサーとして搭載されており、自動駐車など低速域における周辺の距離センサとして活用されています。
Murata 空中超音波センサ アプリケーションガイド-利用方法・用途
ぶつからないロボットに欠かせない! 超音波センシングのススメ
超音波センサとドップラー効果
- 対象物から反射して返ってくる超音波は、対象物の速度に応じて波長が変わってくる。対象物が近づいていれば、波長が短くなる。
- 超音波センサの種類によっては、受信波の波長のシフトを測定することで、対象物の速度を測定できるものも市販されている。
- ドップラー効果での速度の計測の利点:
- 異なる時刻での計測を必要としない。その時刻の計測だけから速度が算出できる。
- (異なる時刻での計測を必要としないので、速度の誤差の要因が少ない。)
- 速度を算出するまでの計算量が少なく、計測した時刻から結果が得られるまでの遅延が少ない。
- 他の距離センサで速度を推定する場合の難しさ:
- 距離の算出は誤差要因がたくさんありすぎる。
- 例:ステレオ計測は、遠方ほど誤差が大きくなりやすい。2つの時刻間の距離の差を算出する際に、誤差が大きくなりやすい。
- 例:それぞれの計測(画像計測)した時刻が、正しく算出できていないと、速度=距離の差/時刻の差 として、誤差を大きくしてしまう。
- 例:2D画像での物体検出枠を、路面上の距離と対応付けてしまうと、物体検出枠の不安定さが、路面上の距離の不安定さになって、速度としてはますます不安定な値になってしまう。
- 2Dの物体検出枠を利用した速度の推定は、最新の画像の取得から、その画像で物体検出を行い、さらに前の時刻での物体検出結果との対応付けを行うまでの時間が遅延として発生してしまう。このため、少ない遅延での応答を期待する用途に物体検出を用いるのは得策ではない。
超音波センサでの距離の算出手順
- 超音波センサでは、送信時刻と受信時刻との時間差を計測するのが基本です。
- そのため、音速を用いて距離に換算します。
- 音速は常圧時でも空気の温度で変わります。
そういったことが、これらの使い方の記事に書いてあります。
ASIMO
視覚センサーでは捉えられないガラスなどを含め、音波で3m先の障害物を検出します。
https://www.honda.co.jp/factbook/asimo/201111/ASIMO2011-11_ja.pdf

USBインタフェースで利用可能な超音波センサもある。
超音波方式 USB 汎用距離センサ・距離計
Arduino Uno での記事電子工作 その14(超音波センサー:HC-SR04の使い方)
製品の検索サイト
3D超音波センサ
超音波距離センサは、最近接の距離を知るためのもので、それが超音波を送受信する範囲のどの角度からきたものかを知ることまではしないものが大半です。
3D超音波センサという製品が存在します。
これは、超音波が戻ってきた方位をも返すセンサです。
そのため、対象物のある方位を知ることができます。
次世代型の衝突防止センサとして利用可能です。
製品の例 TOPOSENS
https://cornestech.co.jp/product/products_toposens