反射弓(reflex arc)を使ってロボットを制御するアプローチがなされている。
従来の逆運動学(inverse kinematics)やZMP(Zero Moment Point)を用いた動作では、計算量が多い、外乱に不安定であるなどの課題がある。
注意:
この記事は制御工学やロボットについては素人が書いています。
逆運動学のアプローチの課題
- 6自由度の系では、6x6の大きさのJacobi 行列。人の両肩から、両手の指先までの自由度はいくらになる? その大きさのJacobi 行列は?
- 手の動作をJacobi行列を元に考えることのやっかいさ。
- Jacobi行列の解説の1例 張山昌論 知能ロボットシステム
- 冗長な自由度をもつロボットでは、逆運動学の不良設定性が問題となり、これをいかに解決するかがロボットの“巧みさ”を実現する鍵となる。
- 冗長な自由度を持つ系の制御問題 ベルンシュタイン問題
ベルンシュタインは著書の中で、「冗長な自由度の克服こそが動物の運動の核心である」という結論づけていますが、この自由度の克服は容易ではありません。
逆運動学を使用しないアプローチ
- 2020年代のいまでは、逆運動学を必要としないアプローチの開発が進んでいるようです。
逆運動学を使用しないアプローチの例
- pdf 生物の反射モデルのロボット制御への応用
- 「本研究では、生物の反射モデルを模倣する新しいモデルとして反射行動の機能モデルを提案した。また、その成立性を明らかにするため、移動ロボットの制御に提案手法を適用し、機能モデルに従うことで、壁や移動物体に衝突することなく走行できるか検証を行った。その結果、移動ロボットが壁や移動物体との距離に応じて興奮度合い(周波数)を変化させ、かつ、興奮度合いに応じた動作を確認した。これにより、構築手法の成立性を明らかにすることができた。」
- 車輪式移動ロボット2輪駆動タイプを使用。
MIT little HermesもしくはHermes
-
MIT News Two-legged robot mimics human balance while running and jumping
-
MIT News A bipedal robot with human reflexes
Ramos says the interface takes advantage of a human’s split-second reflexes, which give the robot much faster reaction times than robots that adjust their balance based on visual feedback from onboard cameras.
和訳
ラモス氏によると、このインターフェースは人間の一瞬の反射神経を利用しており、搭載カメラからの視覚的なフィードバックに基づいてバランスを調整するロボットよりもロボットの反応時間がはるかに速いという。
-
Youtube MIT Little HERMES Bipedal Robot With Two-Way Teleoperation
-
Youtube Robot with human reflexes
倒れないためには、反射のように速い応答が必要。
Dynamic Legged Systems Labの犬型ロボット
開発元 https://www.iit.it/it/web/dynamic-legged-systems
https://www.youtube.com/@DynamicLeggedSystemslab
犬型ロボットでの歩行
反射弓を用いた歩行動作で、段差を超えられるようにする。
AMOS-WD06 (Advanced Mobility Sensor Driven-Walking Device) 6脚ロボット
開発元 https://manoonpong.com/
https://www.youtube.com/@AMOSWD06
-
Autonomous walking robot (AMOS-WD06) under neural control
6脚ロボットで、反射動作を利用している。
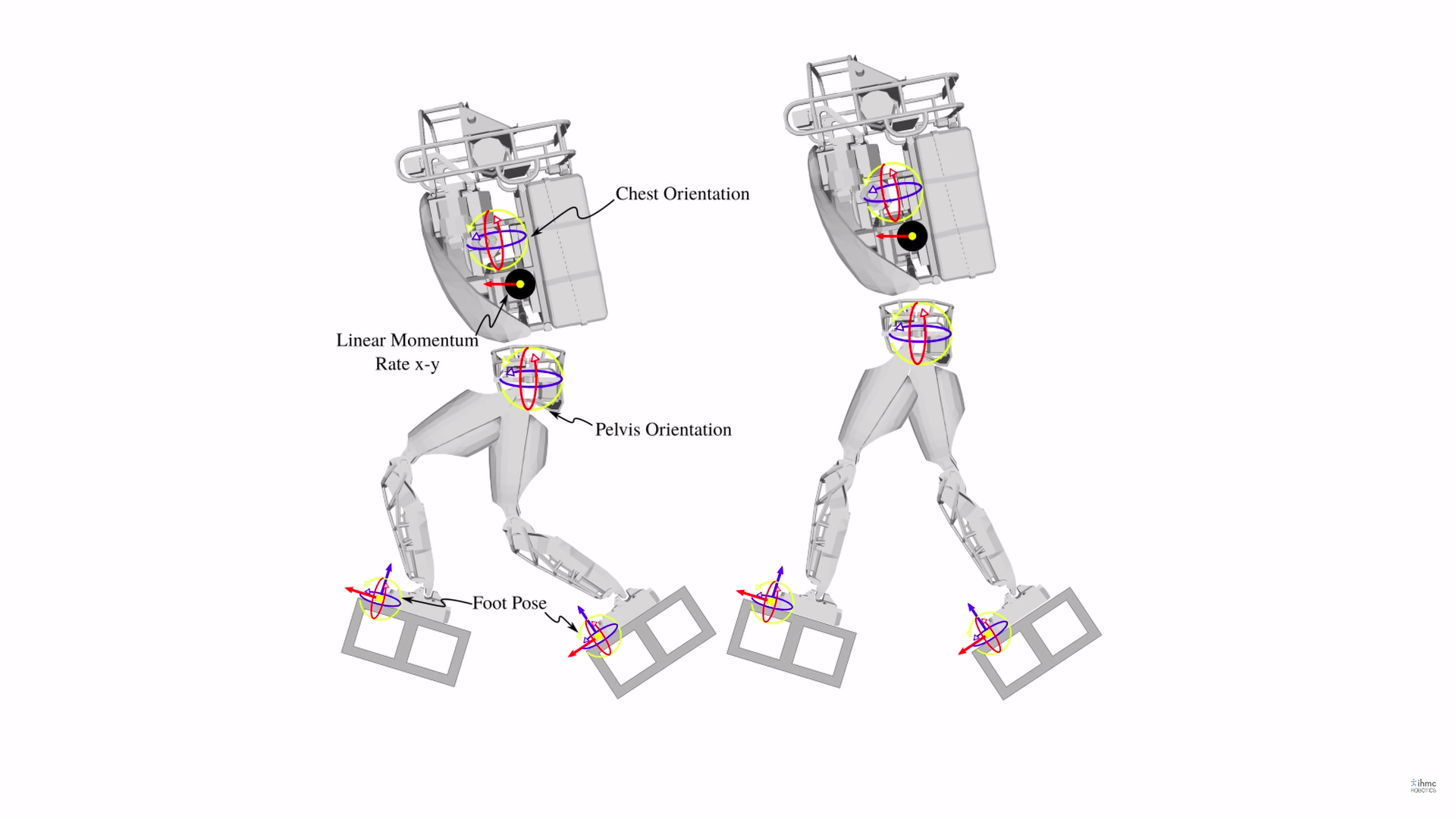
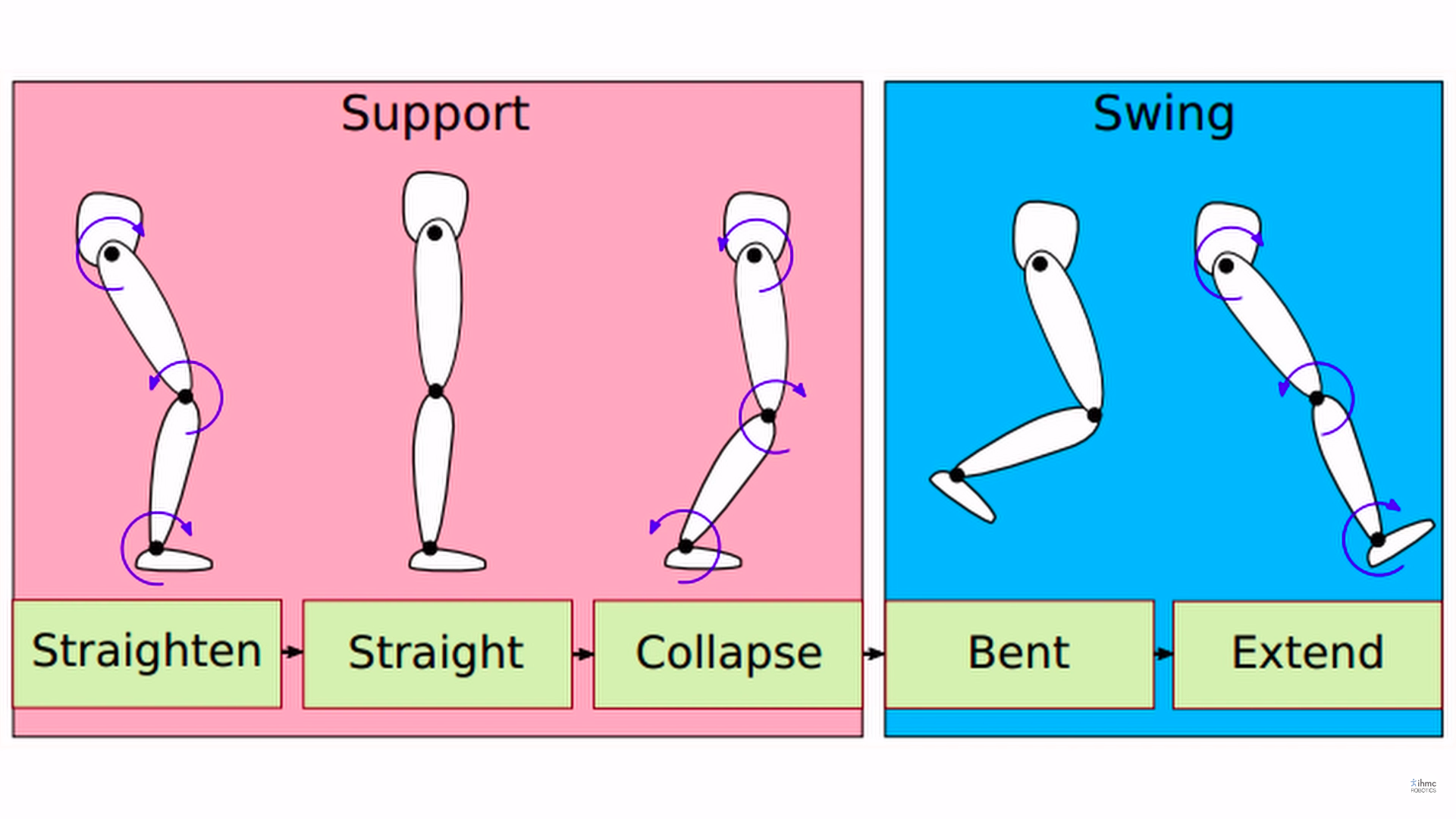
IHMC Robotics, フロリダ人間機械認知研究所
-
IHMC Atlas Autonomous Path Planning Across Narrow Terrain
人型ロボットで、外乱が加わっても倒れにくくする方法の1つがyoutube 動画にあった。
反射という仕組みで実装しているらしい。
大阪大学 増田 容一 助教
ロボット研究家のアウケ・エイスベールト
ロボット研究家のアウケ・エイスベールトは、複雑な地面を進むことが出来る本物の動物をモデルにした、家にあるSF小説に登場するような生物的ロボットをデザインしています。このようなロボットを作る過程は、現場作業、点検、捜索や救出作業に使えるような自走式ロボットの改善につながります。こういったロボットは自然の世界の真似をするというのだけではなく、生物の仕組みをより深く知り、脊髄の知られざる秘密を解き明かしてくれます。
Hugh Herr(MIT)
TED 走り、登り、踊ることを可能にする新たなバイオニクス義肢
ヒュー・ハーは次世代のバイオニック義肢、自然にあるデザインをヒントに作られたロボティクスを駆使した義肢を作っています。ハーは30年前、両足を登山中の事故により失いました。現在MITメディアラボのバイオメカトロニクスグループを率いる彼は、専門的でもあり深くパーソナルでもあるトークの中で、驚くべきテクノロジーを紹介します。2013年のボストンマラソン爆破事件で左脚を失った社交ダンサーのエイドリアン・ハスレット=デービスが、このトークのために、事故後初めてのダンスをTEDステージで披露します。
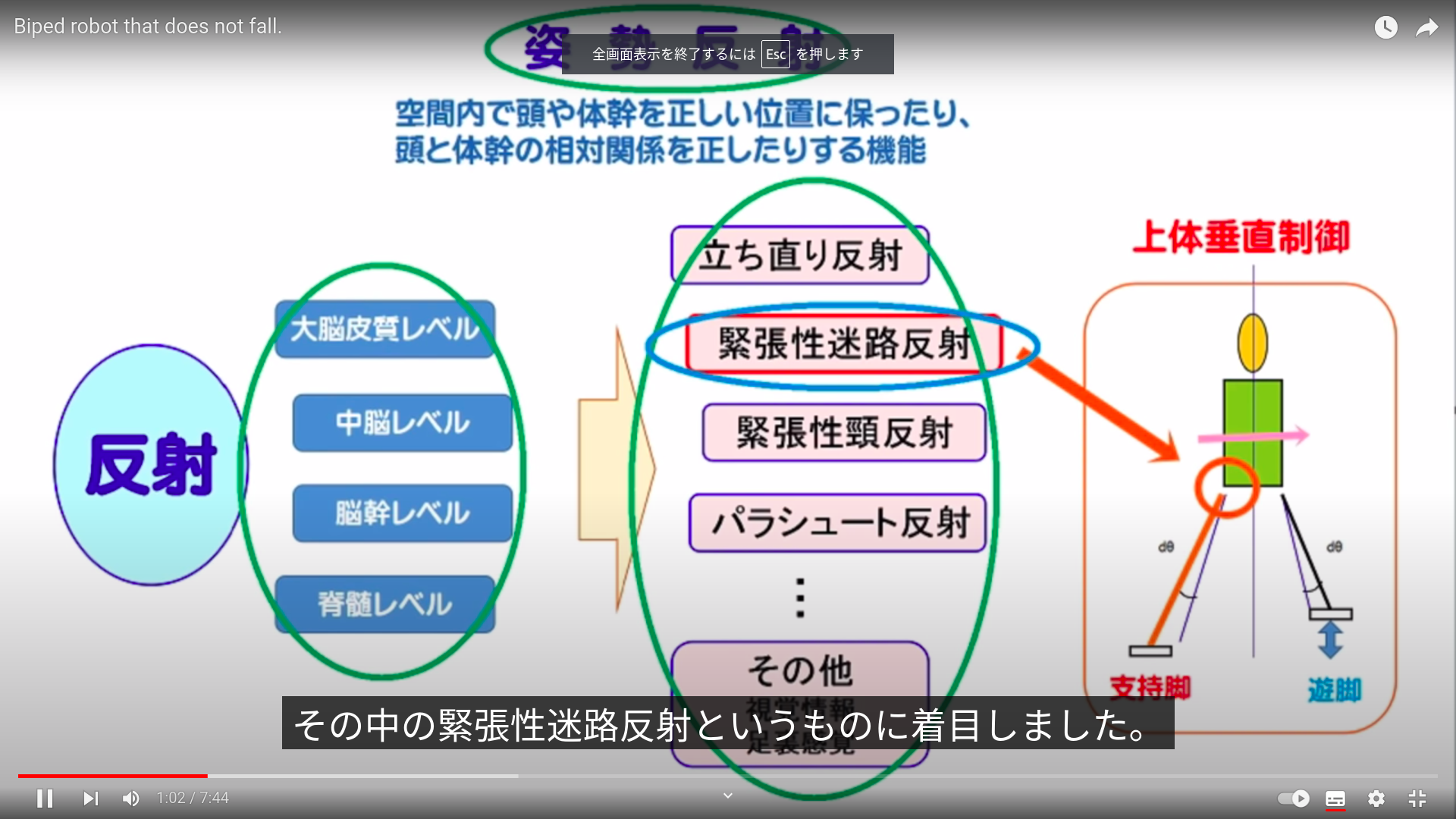
DrGuero2001 による日本語でのYoutube
http://ai2001.ifdef.jp/
Youtube https://www.youtube.com/@DrGuero2001
-
Youtube 二足歩行ロボットのバランス制御と応用例(Balance control of a biped robot and application examples)
-
Youtube Biped robot that does not fall.