ハンドを動かすためにはmotion planningが必要である。
まったくの門外漢による調査である。
この分野では、まだgithub にソースを載せることは一般的になっていないようだ。
Matlab webnar Real-Time Motion Planning for Collaborative Robot Arms
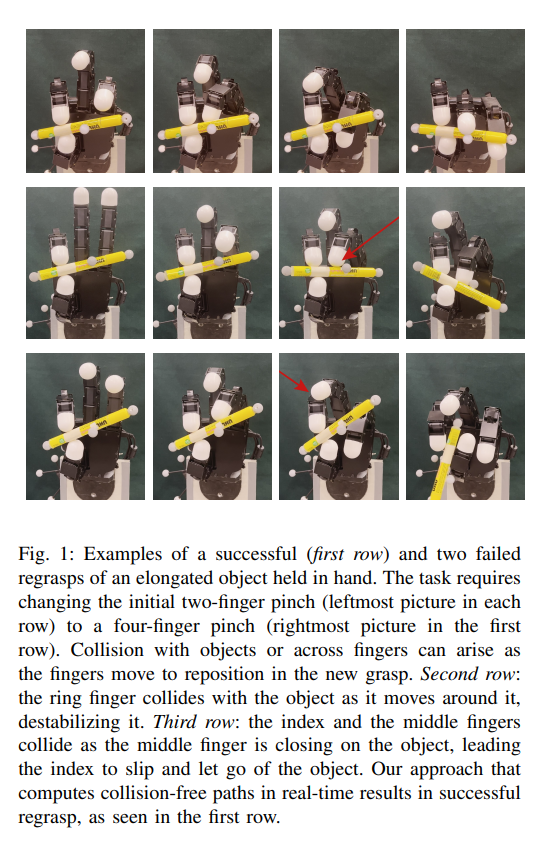
Real-Time Motion Planning for In-Hand Manipulation with a Multi-Fingered Hand 2023
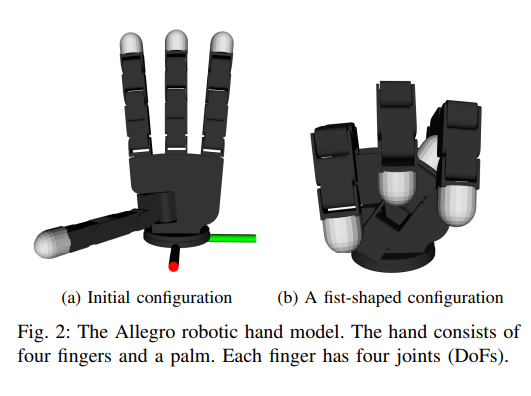
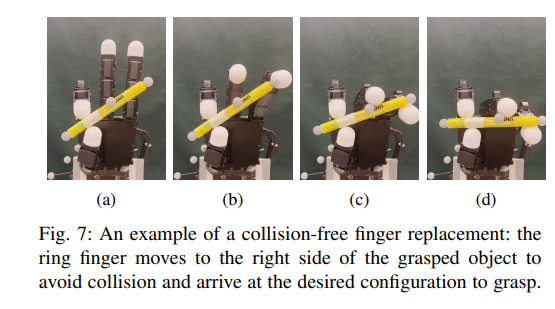
かつて手で持っていた物体を器用に操作することは、依然として課題である。しかし、このようなスキルは、ロボット工学がグリッパーベースの操作を超え、擬人化されたロボットハンドが提供する器用さをすべて利用するために必要である。手の中で物体を操作する際の大きな課題の1つは、指が他の指や物体との衝突を避けながら物体の周囲を移動しなければならないことである。このような衝突のない経路はリアルタイムで計算されなければならず、元の計画からのわずかなずれが衝突につながりやすいからである。我々は、高次元空間における衝突のない経路を計算するリアルタイムアプローチを提案する。探索を導くために、我々はリアルタイムで取得可能な自由空間の明示的表現を学習する。さらに、この表現を、力学系による閉ループ制御とサンプリングに基づく運動計画と組み合わせることで、他の方法よりも性能が向上し、実現可能な経路の効率的な探索と、多指ロボットハンドにおけるリアルタイムの障害物回避が可能になることを示す。
DeepL.com(無料版)で翻訳しました。
Vision-Based Dexterous Motion Planning by Dynamic Movement Primitives with Human Hand Demonstration 2024
本論文では、7自由度ロボットマニピュレータのための視覚ベースのフレームワークを提案する。主な目的は、器用なピックアンドプレースタスクを実行するために、人間の手のデモンストレーションから情報を取得する能力を容易にすることである。既存のほとんどの研究は、向きを考慮することなく、位置のデモンストレーションにのみ焦点を当てている。本論文では、1台のデプスカメラを使用することで、MediaPipeを人間の手の3次元座標の生成に適用し、手首の軌跡、手の向き、把持動作を含む手の動きを包括的に記録する。データの前処理として平均フィルタを適用し、生データを平滑化する。デモは、特定の角度で物体を拾い上げ、進路上の障害物を回避し、その後、傾斜のある容器内に預けるように設計されている。このロボットシステムは、動的動作プリミティブの実装により学習能力を発揮し、始点と終点が異なる軌道にユーザーの動作を同化させることができる。本作品の有効性を実証するために、実験的研究を実施した。
DeepL.com(無料版)で翻訳しました。
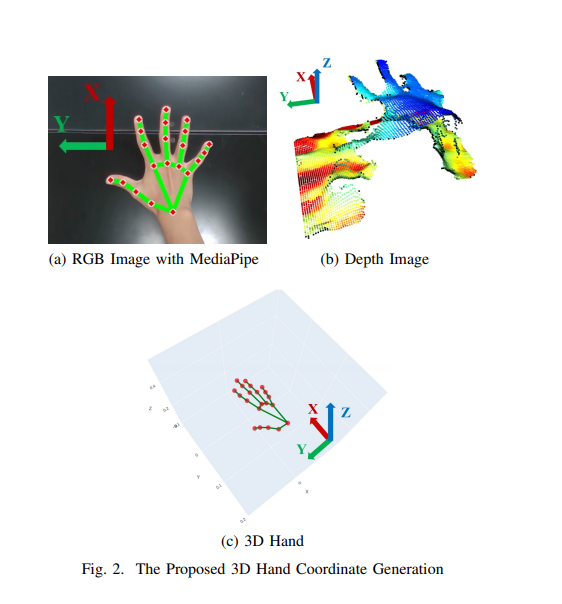
Q: Depth画像での指の位置は、指の表面のものになる。しかし、モーションとしてほしいのは、おそらくは、指の骨の位置。さらに把持動作・接触に関わるものは、見えていない指の腹側の位置。どうやっているのだろう。
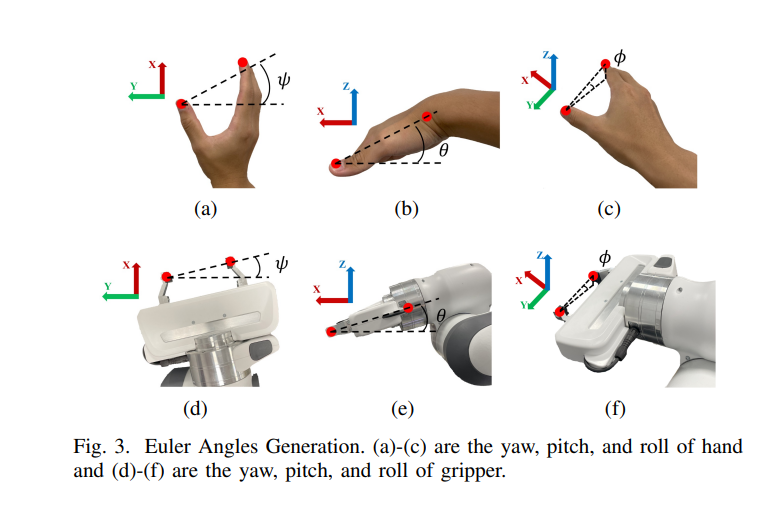
この図では、人の手によるデモンストレーションを元に、ハンド(=gripper) のEuler角を与える方法を述べているらしい。
Motion planning for high DOF anthropomorphic hands 2009
本論文では、衝突を回避する擬人化された機械的な手の運動計画の問題を扱う。提案するアプローチは、実際の人間の手の動きを模倣しようとするものであるが、運動の最適性と計画の複雑さ(時間)の妥協点として結果を得るために、主運動方向の概念によって探索空間の次元を縮小する。基本的に、この研究は以下の段階を含んでいる:センサー付きグローブを用いて人間の手の作業空間をキャプチャし、それを機械的な手の作業空間にマッピングすること、最も関連性の高い主運動方向を探すことによって空間の次元を縮小すること、サンプリングベースのロードマッププランナを用いて手の動きを計画すること。本アプローチは、4本の指を持つ擬人化された機械ハンドに対して実装されており、その有効性を説明するためにいくつかの例が含まれている。
DeepL.com(無料版)で翻訳しました。
2009年と古い。
Motion Planning For A Four-Fingered Robotic Hand 2017
本論文では、4本指の腱で動作するロボットハンドの軌道計画の概念について議論する。ロボットハンドの指は、多数の逆運動学解の中から最良の解を用いて与えられた軌道を追跡することが望まれる。指の優先順位は与えられた軌道を追跡することである。この課題を達成するために、関節速度の一般解をヤコビ行列の一般化逆行列によって解釈するヤコビ行列の擬似逆行列が利用される。数値シミュレーションを直線、円、楕円軌道に対して行い、制御スキームの有効性を示す。
DeepL.com(無料版)で翻訳しました。
2017の論文である。腱で動作する。逆動力学のアプローチ。
Motion planning: Decoupled motion planning algorithm for high DOF robot with topological re-planner
pdf
高次元の動作計画は計算量的に困難な問題であり、問題の難易度を下げる一つの方法は、問題をデカップリングすることである。このプロジェクトでは、まずロボット先端の経路を計画し、次に経路計画の各部分についてロボット構成を計画するデカップリングアルゴリズムを提案する。このアルゴリズムは、高自由度ロボットアームのための古典的な運動計画アルゴリズムよりも計算コストが低いはずである。
The Open Motion Planning Library