目的
ROSのgmappingなどでSLAMを行うためには、
TFで、"odom"→"base_link(or base_footprint)"の発行を行う必要がある。
実装
TFで、"odom"→"base_link(or base_footprint)"の発行を行うソースは以下
# include <ros/ros.h>
# include <tf/transform_broadcaster.h>
# include <nav_msgs/Odometry.h>
void odom_calc(double &state_odom_x,double &state_odom_y,double &state_odom_th){
//ここでエンコーダ値を読み取り、オドメトリ変換する演算を行う。
}
int main(int argc, char **argv){
tf::TransformBroadcaster odom_broadcaster;
ros::Time current_time;
current_time = ros::Time::now();
ros::Rate r(30.0);
double state_odom_x=0.0;//オドメトリX座標[m]
double state_odom_y=0.0;//オドメトリY座標[m]
double state_odom_th=0.0; //オドメトリ姿勢[rad]
while(nh.ok()){
odom_calc(state_odom_x,state_odom_y,state_odom_th);
current_time = ros::Time::now();
//tf odom->base_link
geometry_msgs::TransformStamped odom_trans;
odom_trans.header.stamp = current_time;
odom_trans.header.frame_id = "odom";
odom_trans.child_frame_id = "base_link";
odom_trans.transform.translation.x = state_odom_x;
odom_trans.transform.translation.y = state_odom_y;
odom_trans.transform.translation.z = 0.0;
geometry_msgs::Quaternion odom_quat = tf::createQuaternionMsgFromYaw(state_odom_th);
odom_trans.transform.rotation = odom_quat;
odom_broadcaster.sendTransform(odom_trans);
ros::spinOnce();
r.sleep();
}
}
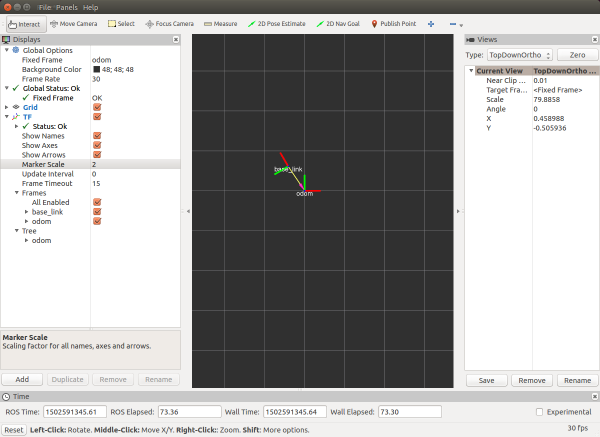
確認
rvizでtfが発行されていることを確認する。
座標系があっているかをよく確認する。
参考:
ROS wiki Publishing Odometry Information over ROS
http://wiki.ros.org/ja/navigation/Tutorials/RobotSetup/Odom