目的
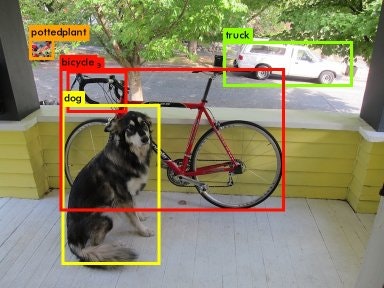
深層学習フレームワークdarknetのYOLO(You only look once)特徴量による物体認識を、ROSラッパーしたパッケージ”darknet_ros”をWEBカメラと接続して動かしてみた。
darknet_ros”はETH Zurich(チューリッヒ工科大)のRobotic Systems Labが作成したものを使用した。
環境
Ubuntu 16.04(x64)
ROS:Kinetic
GPU:NVIDIA GeForce GTX1050
インストール
ROSのcatkin-toolsをインストールする。
これで catkin buildコマンドが使えるようになる。
sudo apt-get install python-catkin-tools
darknetをダウンロードし、catkinでコンパイルする。
mkdir -p ~/catkin_darknet/src
cd ~/catkin_darknet/src
git clone --recursive https://github.com/leggedrobotics/darknet_ros.git
cd ../
catkin build darknet_ros
ROSにパッケージの情報を読みこむ。
source ~/catkin_darknet/devel/setup.bash
実行
コンソースを3つ立ち上げ、以下のコマンドを実行する。
roscoreの起動
roscore
usbカメラの起動
rosrun usb_cam usb_cam_node /usb_cam/image_raw:=/camera/image_raw
darknet_rosの起動
roslaunch darknet_ros darknet_ros.launch
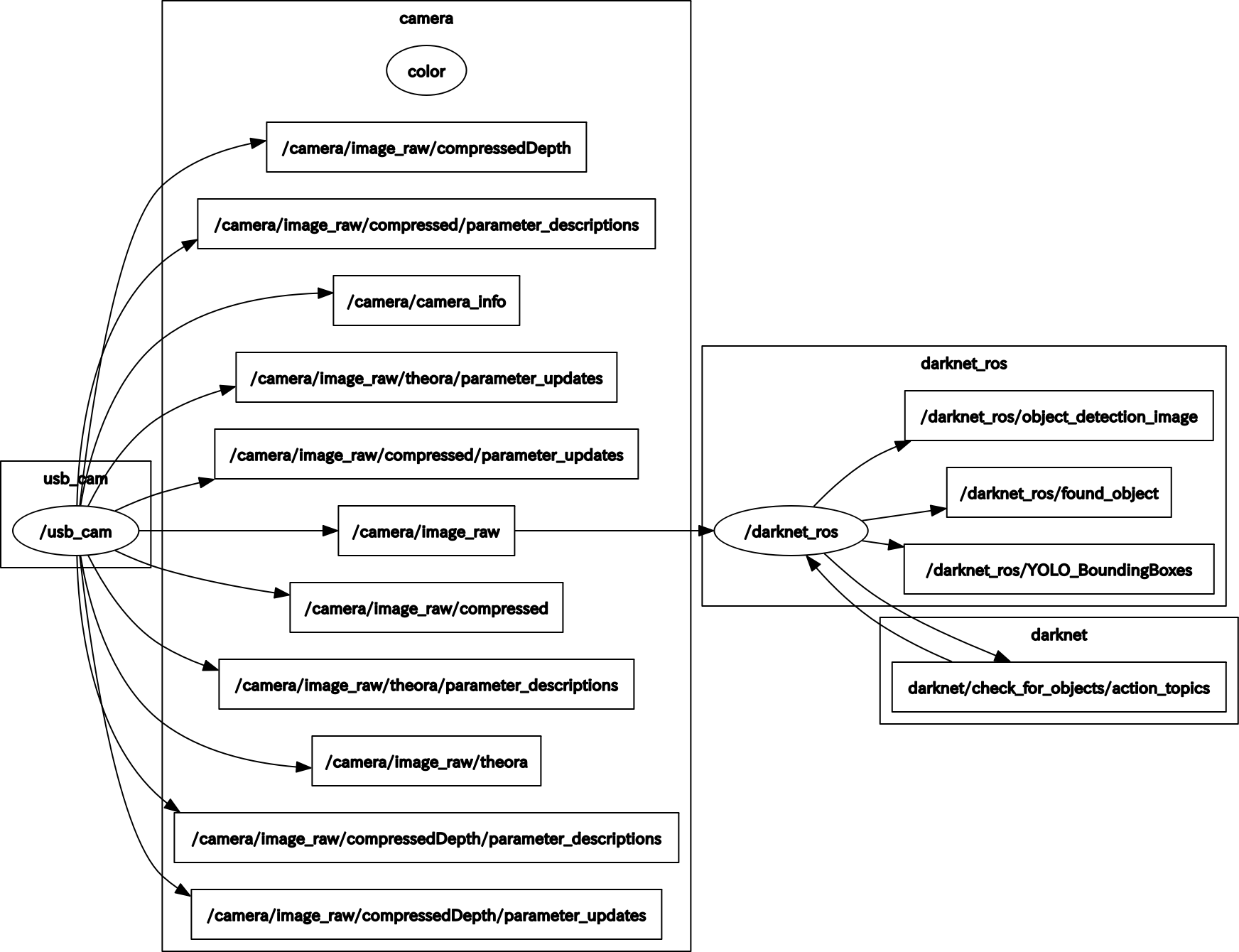
rqt_graphの図は以下の様になっている。
検出結果は、/darknet_ros/YOLO_BoundingBoxesでPublishされる。
$ rostopic echo /darknet_ros/YOLO_BoundingBoxes
---
boundingBoxes:
-
Class: person //物体の識別
probability: 0.382561951876 //尤度
xmin: 69 //物体のboundingBoxの左上座標
ymin: 0 //物体のboundingBoxの左上座標
xmax: 640 //物体のboundingBoxの右下座標
ymax: 480 //物体のboundingBoxの右下座標
---