ガウス過程回帰をnumpyで実装
ガウス過程回帰は、GPyなどの便利なライブラリもあるが、今回はnumpyで実装してみる。
データセットは前回記事を引用。
必要ライブラリのインポート
import numpy as np
np.random.seed(1)
import matplotlib.pyplot as plt
from itertools import product
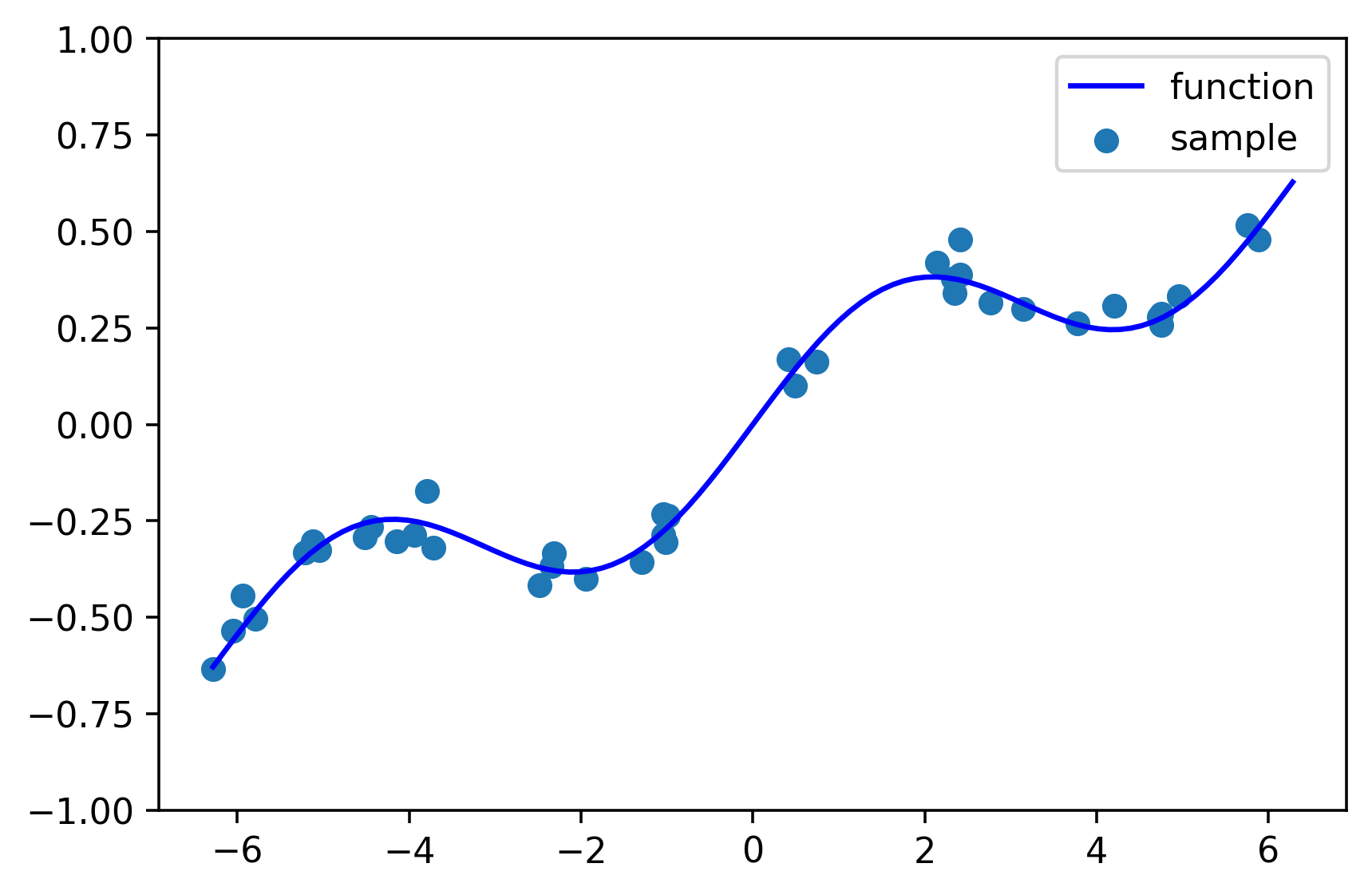
サンプルデータの生成
sin関数+1次関数に、正規分布のノイズを加える。
# 目的関数
def function(x):
y = 0.2*np.sin(x) + 0.1*x
return y
# データを生成
n_sample = 40
X = np.random.uniform(-2*np.pi, 2*np.pi, n_sample)
Y = function(X) + np.random.normal(loc=0, scale=0.05, size=n_sample)
# 推定したいXの値
X_pred = np.linspace(-2*np.pi, 2*np.pi, 101)
# データ数
N = n_sample
# プロット
plt.figure(figsize=(6,4), dpi=320)
plt.scatter(X, Y, label="sample")
plt.plot(X_pred, function(X_pred), c='blue', label="function")
plt.ylim(-1, 1)
plt.legend()
plt.show()
ガウス過程回帰
事前に$N$個の観測データ$\boldsymbol{x}, \boldsymbol{y}$が得られているとする。ガウス過程回帰では、予測モデル$\boldsymbol{\hat{y}}$は平均0、共分散行列$K$のガウス分布から生成されるとする。
\boldsymbol{\hat{y}} \sim N(0, K)
$K$はカーネル行列と呼ばれ、観測済みデータのすべての組み合わせでカーネル値をとったもの(データ数×データ数の行列となる)。
K=
\begin{pmatrix}
k(\boldsymbol{x}_1, \boldsymbol{x}_1) & k(\boldsymbol{x}_1, \boldsymbol{x}_2) & \cdots & k(\boldsymbol{x}_1, \boldsymbol{x}_N)\\
k(\boldsymbol{x}_2, \boldsymbol{x}_1) & k(\boldsymbol{x}_2, \boldsymbol{x}_2) & \cdots & k(\boldsymbol{x}_2, \boldsymbol{x}_N)\\
\cdots & \cdots & \cdots & \cdots \\
k(\boldsymbol{x}_N, \boldsymbol{x}_1) & k(\boldsymbol{x}_N, \boldsymbol{x}_2) & \cdots & k(\boldsymbol{x}_N, \boldsymbol{x}_N)\\
\end{pmatrix}
カーネル関数はここでは以下のRBFカーネルを採用する。$\delta(\boldsymbol{x}, \boldsymbol{x}')$は、クロネッカーのデルタと呼ばれ、$\boldsymbol{x}$と$\boldsymbol{x}'$が等しいとき、つまりカーネル行列の対角項で1(正則化と同様の働きを持つ)、それ以外で0をとる。
k(\boldsymbol{x}, \boldsymbol{x'}) = θ_1exp\Bigl(\frac{(\boldsymbol{x} - \boldsymbol{x}')^2}{θ_2}\Bigr)+θ_3\delta(\boldsymbol{x}, \boldsymbol{x}')
ここで、新たな設計変数$\boldsymbol{x}_p$に対する予測値$y_p$を得たい場合、以下のように予測モデルを書き換える。
\begin{pmatrix}
\boldsymbol{\hat{y}} \\
y_p \\
\end{pmatrix}
\sim N
\begin{pmatrix}
0, &
\begin{pmatrix}
K & k_* \\
k^T_* & k_{**} \\
\end{pmatrix}
\end{pmatrix}
既存のデータ$D$が与えられたときの、$\boldsymbol{x}_p$に対応する$y_p$の条件付確率は以下で表すことができる。
p(y_p | \boldsymbol{x}_p, D)
\sim N
\begin{pmatrix}
k^T_* K^{-1} \boldsymbol{y}, &
k_{**}-k^T_* K^{-1} k_*
\end{pmatrix}
## ガウス過程回帰
# カーネル関数
def kernel(xi, xj, theta=[1, 1, 0.1]):
delta = 1 if xi==xj else 0
return theta[0] * np.exp(- (xi-xj)**2 / theta[1]) + theta[2]*delta
M = len(X_pred)
# カーネル行列の計算(K)
K = np.zeros((N, N))
for i, j in product(range(N), range(N)):
K[i][j] = kernel(X[i], X[j])
K[j][i] = K[i][j]
# カーネル行列の生成(K*)
Ks = np.zeros((N, M))
for i, j in product(range(N), range(M)):
Ks[i][j] = kernel(X[i], X_pred[j])
# カーネル行列の生成(K**)
Kss = np.zeros((M,M))
for i, j in product(range(M),range(M)):
Kss[i,j] = kernel(X_pred[i], X_pred[j])
#Kss[j][i] = Kss[i][j]
# 予測
mean = Ks.T.dot(np.linalg.inv(K)).dot(Y)
covmatrix = Kss - Ks.T.dot(np.linalg.inv(K)).dot(Ks)
var = np.diag(covmatrix)
回帰結果
# 結果を描画
plt.figure(figsize=(6,4))
plt.scatter(X, Y, label="sample", c='blue')
plt.plot(X_pred, function(X_pred), c='blue', label="function")
plt.plot(X_pred, mean, label="predict_gp", c="red")
plt.fill_between(X_pred, mean+2*np.sqrt(var) , mean-2*np.sqrt(var),
alpha=0.2, color="orange", label="confidence 2σ")
plt.ylim(-1, 1)
plt.legend()
plt.show()
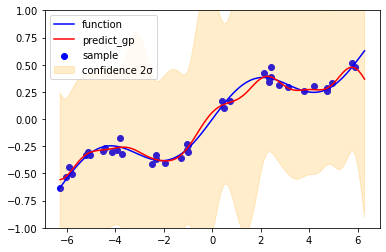
赤いライン(予測平均)は、前回のカーネルリッジ回帰での$θ=0.1$の場合と同じになる。橙色の領域は2σ信頼区間を示しているが、幅が広くグラフの大部分を覆い隠してしまっている。これを修正するためには、ハイパーパラメータの調整が必要となる。
ガウス過程回帰(ハイパーパラメータ調整版)
オブジェクト指向に書き直し。対数尤度Lを最大化するハイパーパラメータを探索する。
最適化ソルバーには、scipy.optimize.minimize(method="SLSQP")を用いた。
## ガウス過程回帰
class GPR:
def __init__(self):
print("GPR")
self.X = None
self.Y = None
self.theta = [1,1,0.1]
pass
# データを定義
def setData(self, X, Y):
self.X = X
self.Y = Y
# ハイパラを定義
def setHyperParameter(self, theta):
self.theta = theta
# カーネル関数
def kernel(self, xi, xj):
delta = 1 if xi==xj else 0
return self.theta[0] * np.exp(- (xi-xj)**2 / self.theta[1]) \
+ self.theta[2]*delta
# カーネル行列
def kernelMatrix(self):
# カーネル行列の計算(K)
N = len(self.X)
K = np.zeros((N, N))
for i, j in product(range(N), range(N)):
K[i][j] = self.kernel(self.X[i], self.X[j])
K[j][i] = K[i][j]
return K
# 尤度関数の定義
def likelihood(self, theta):
# ハイパーパラメータ
self.theta = theta
# カーネル行列の再計算
K = self.kernelMatrix()
# 尤度
L = - np.log(np.linalg.det(K)) \
- self.Y.T.dot(np.linalg.inv(K)).dot(self.Y)
# デバッグ
print(f"theta: {theta}, likelihood:{L}")
return -1 * L #最適化のために反転
# ハイパーパラメータの調整
def hyperParameterOptimizer(self):
# 最小化
opt = scipy.optimize.minimize(fun=self.likelihood,
x0=[1,1,1],
bounds = ((1e-6,np.inf),(1e-6,np.inf),(1e-6,np.inf)),
method="SLSQP")
# 最適ハイパラを渡す
self.theta = opt.x
# 予測
def predict(self, X_pred):
# データ数
N = len(self.X)
M = len(X_pred)
# 既存データからカーネル行列を生成
K = self.kernelMatrix()
# カーネル行列の生成(K*)
Ks = np.zeros((N, M))
for i, j in product(range(N), range(M)):
Ks[i][j] = self.kernel(self.X[i], X_pred[j])
# カーネル行列の生成(K**)
Kss = np.zeros((M,M))
for i, j in product(range(M),range(M)):
Kss[i,j] = self.kernel(X_pred[i], X_pred[j])
# 予測
mean = Ks.T.dot(np.linalg.inv(K)).dot(Y)
covmatrix = Kss - Ks.T.dot(np.linalg.inv(K)).dot(Ks)
var = np.diag(covmatrix)
return mean, var
# 推定
gp = GPR()
gp.setData(X,Y)
gp.hyperParameterOptimizer()
mean, var = gp.predict(X_pred)
回帰結果(ハイパーパラメータ調整後)
# 結果を描画
plt.figure(figsize=(6,4))
plt.scatter(X, Y, label="sample", c='blue')
plt.plot(X_pred, function(X_pred), c='blue', label="function")
plt.plot(X_pred, mean, label="predict_gp", c="red")
plt.fill_between(X_pred, mean+2*np.sqrt(var) , mean-2*np.sqrt(var),
alpha=0.2, color="orange", label="confidence 2σ")
plt.ylim(-1, 1)
plt.legend()
plt.show()
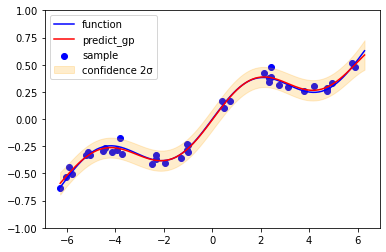
尤度最大化によって求めたハイパーパラメータは、Θ=[3.43209672e-01, 1.34840982e+01, 1.84642705e-03]。
先ほどと比べ、2σ信頼区間の幅が妥当になっている。