はじめに
aeroTAP 3D USBカメラをRaspberryPi4で動かすために、SDKを作成しました。
超簡単な手順でのサンプルコードのビルド方法と実行について記載しておきます。
実行結果
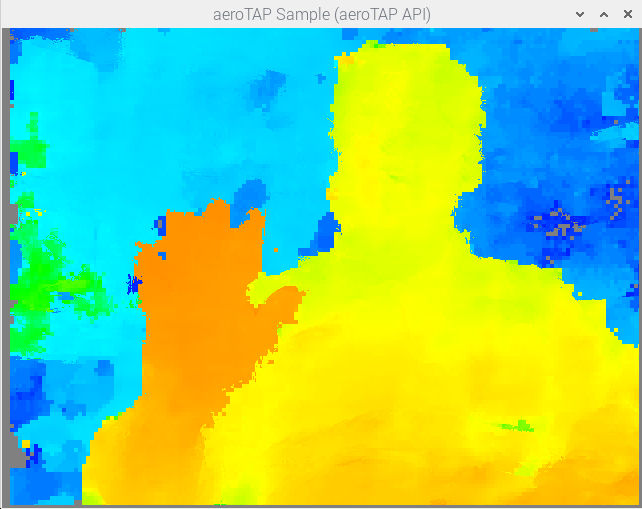
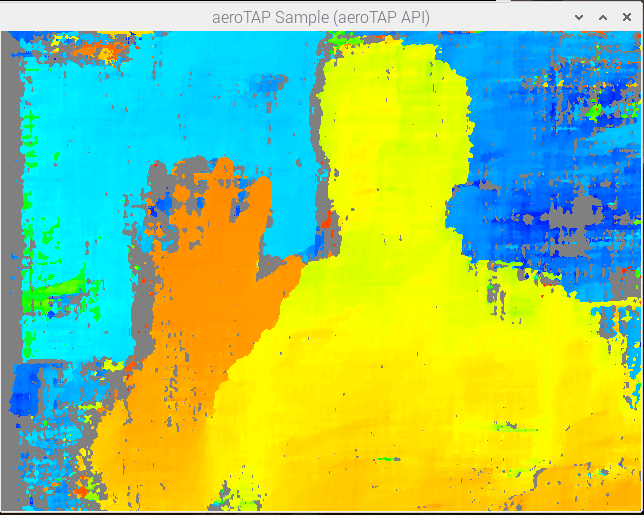
-f オプションでサンプルプログラム aerotap_RGBDを起動すると、このように距離データを色で表したDepth Map画像が表示できます。VGA ( 640x480 )で表示しています。少し、タイムタグがありますがまあまあかな?
#準備
aeroTAP 3D USBカメラ
Raspberry Pi4
##RaspberryPi4イメージの作成
イメージは、下記のバージョンを使いました。
2019-09-26-raspbian-buster.zip
[ダウンロード] https://www.raspberrypi.org/downloads/raspbian/
#RaspberryPi4初期設定
Micro-SDカードにイメージを書き込んで、Pi4を起動。起動時にパスワード設定とWi-Fi設定を行う。
###その他の設定、ターミナルで下記を実行
sudo apt-get clean
sudo apt-get update
sudo apt-get upgrade
###SSHを設定
sudo raspi-config
メニューから Interfacing Options->P2 SSH ->Yes
###ファイルシステム拡張
7 Advanced Options ->A1 Expand Filesystem and hit Enter
7 Advanced Options ->A3 Memory Split and hit Enter
64 でを選択
###再起動
shutdown -r now
##最低必要なリソースのインストール
sudo apt-get install libusb-1-0
sudo apt-get install libudev-dev
sudo apt-get install freeglut3-dev
sudo apt-get install libv4l-dev
sudo apt-get install libjpeg-dev
sudo apt-get install cmake
#aeroTAP SDK for Linuxのダウンロード
[aeroTAPSDK0511.zip] http://www.aerotap.com/Help.SDK/sample/aeroTAPSDK0511.zip
wget http://www.aerotap.com/Help.SDK/sample/aeroTAPSDK0511.zip
#SDKの展開
unzip aeroTAPSDK0511.zip
#SDKサンプルのビルド
cd aeroTAPSDK/sample/RGBD
mkdir build
cd build
cmake ..
make
サンプルの実行
./aerortao_RGBD

escキーで終了します。画面をクリックすると、Depth Map表示、カラー表示、グレースケール表示が切り替わります。
###起動オプション
-f フィルター有効化(簡単なPost処理をしています)
-r0 解像度320x240 QVGAで取得します。かなりリアルタイムに近くなります。
ソースコードも提供しているので、Depth Mapのみ取得することでより高速化が可能です。
挑戦してみてください。
注意: aeroTAP 3D USBカメラは、USB3.0にも対応していますが、USB2.0ポートに接続してください。
aeroTAP 3D カメラに関する情報は、こちら [ www.aeroTAP.com ] http://www.aeroTAP.com
さらに、3Dカメラをネットワークサーバー化するには、こちらを参照してください。