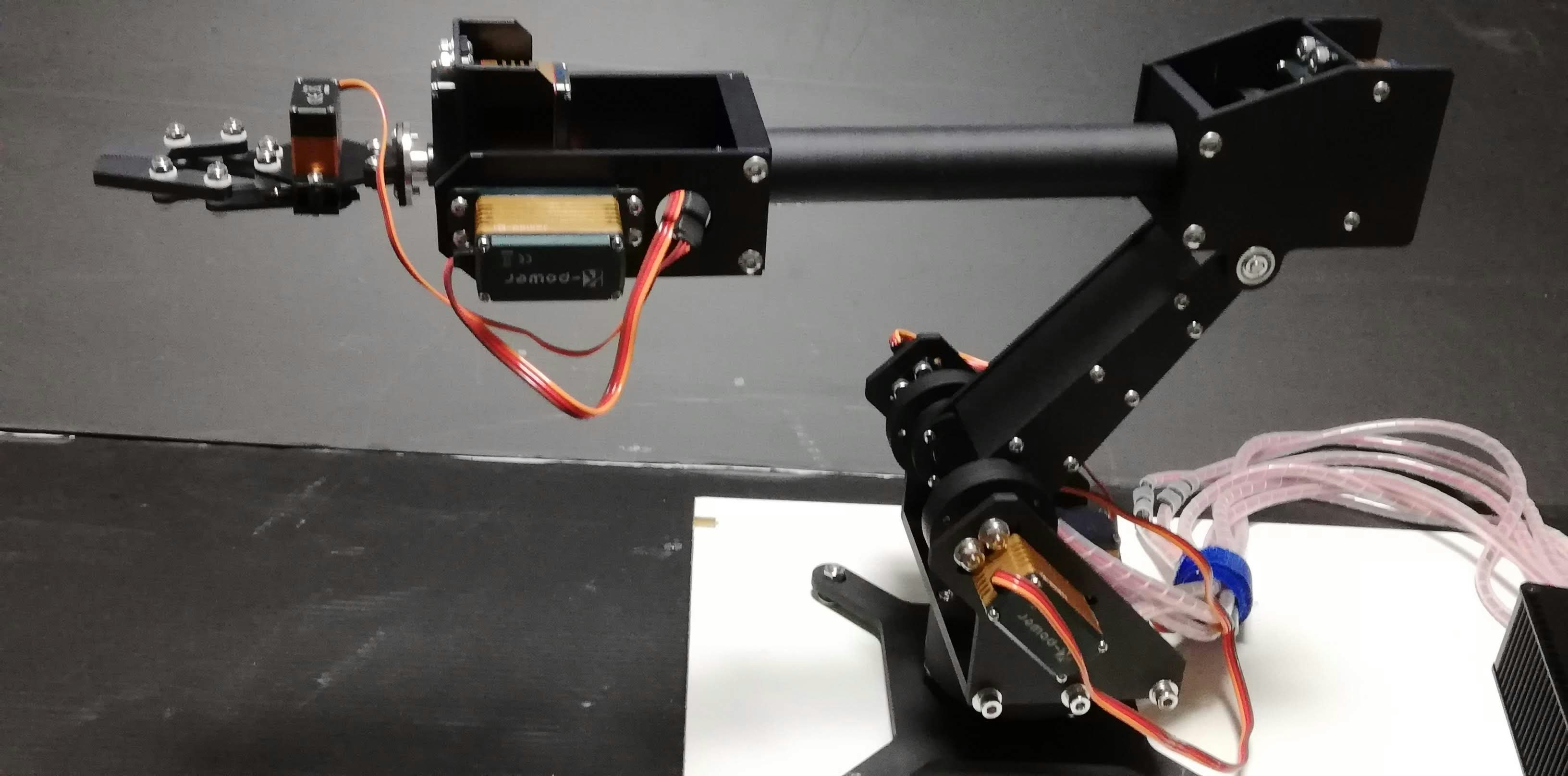
TsukArm は 株式会社MTMシステムズのロボットアーム。
- 7軸ロボットアーム
- Arduinoでコントロール、制御プログラムを書くのも簡単。
- トルク26.3kg-cm。それに見合う剛性で、実用にも応用できる
- オープンソースハードウェア
- ロボットアーム本体は CC BY NC
- ドキュメント、ソフトウェア類は CC BY SA
- 過去のオープンソースロボットアームプロジェクト、7botやnanabo を継承している。
今回、デモ品を借りてきたのでちょっと触ってみた。
開封
パッケージはアルミケース

中身はスポンジで一式が保護されています
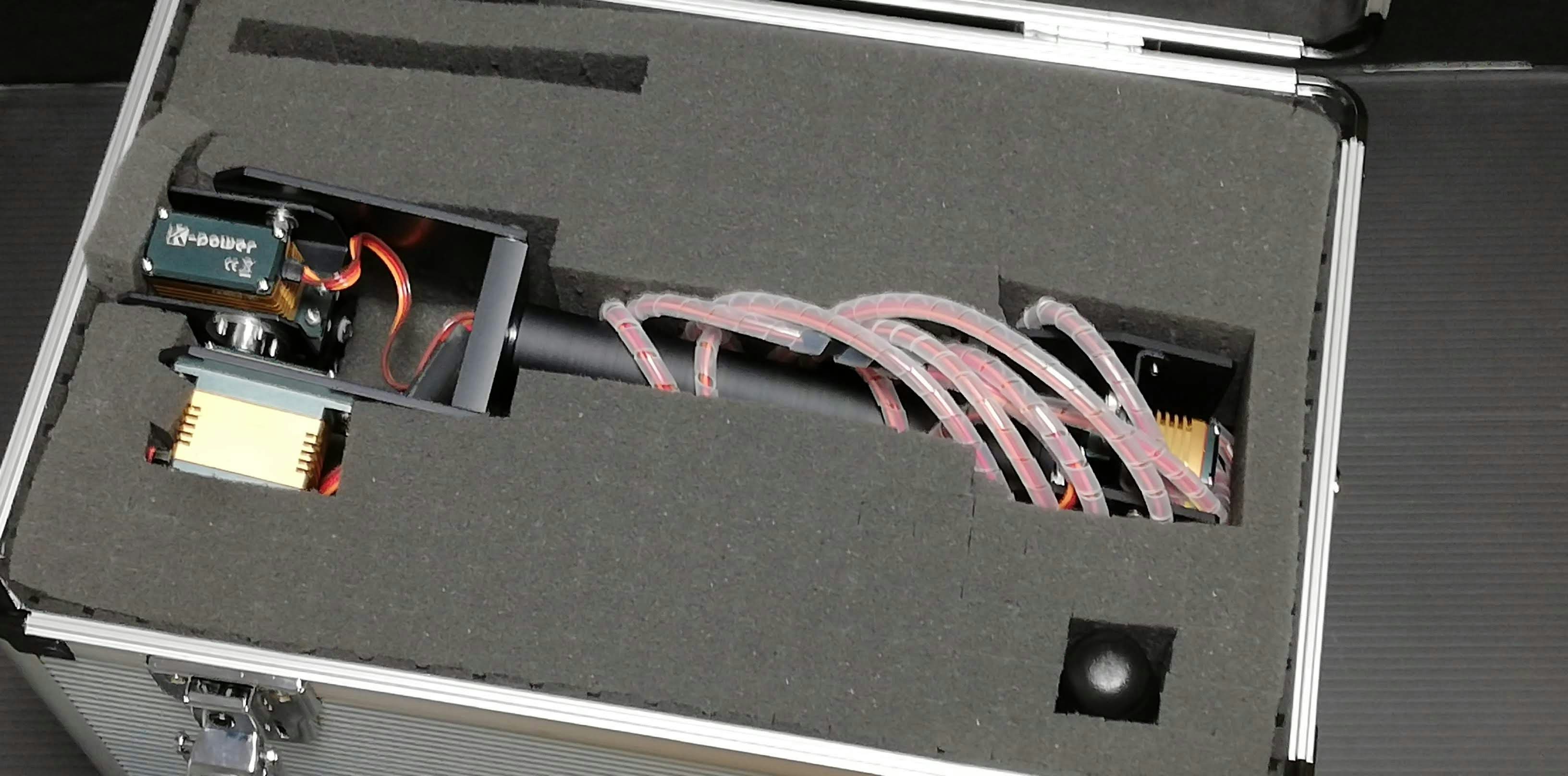
内容物:
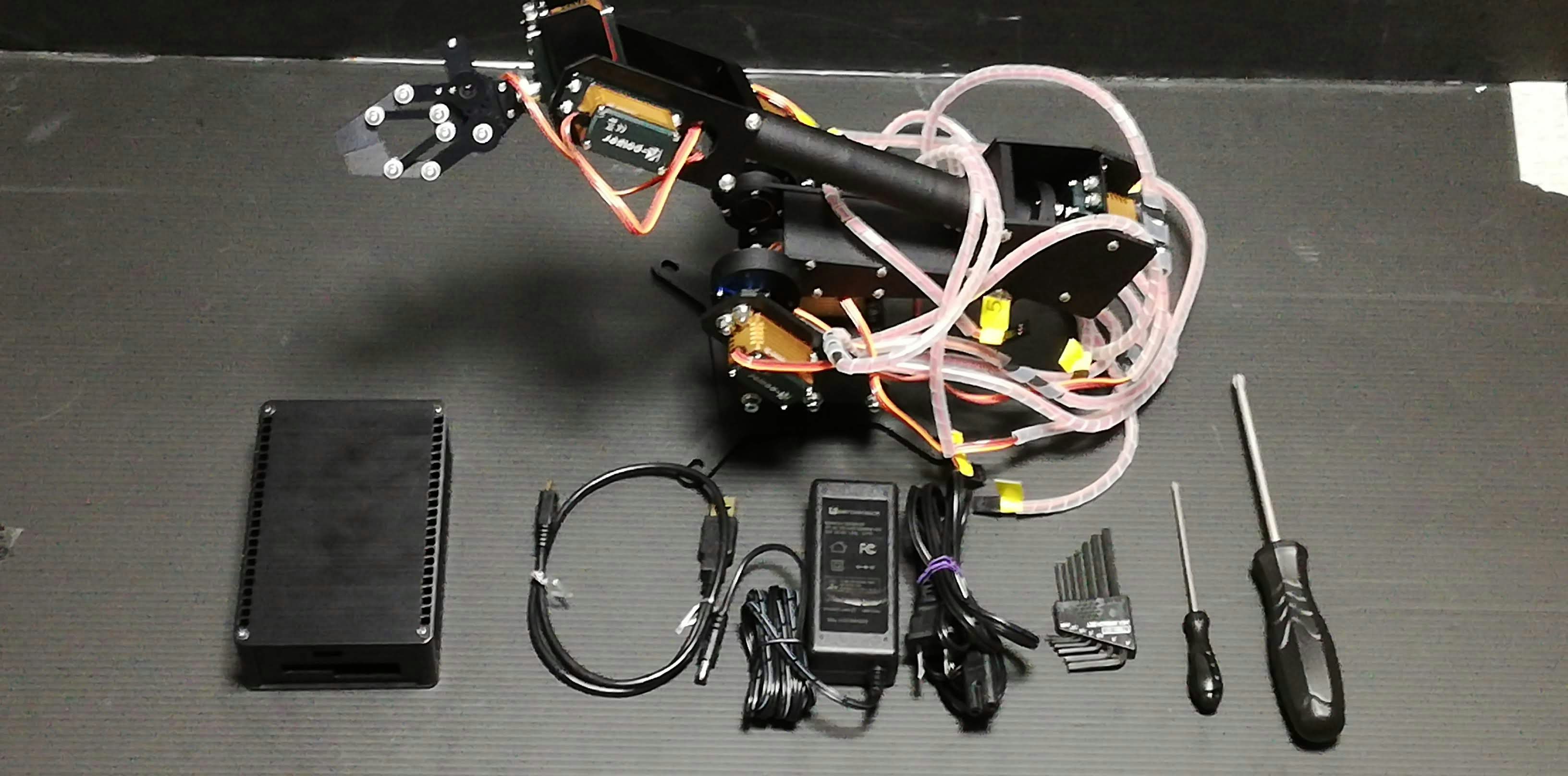
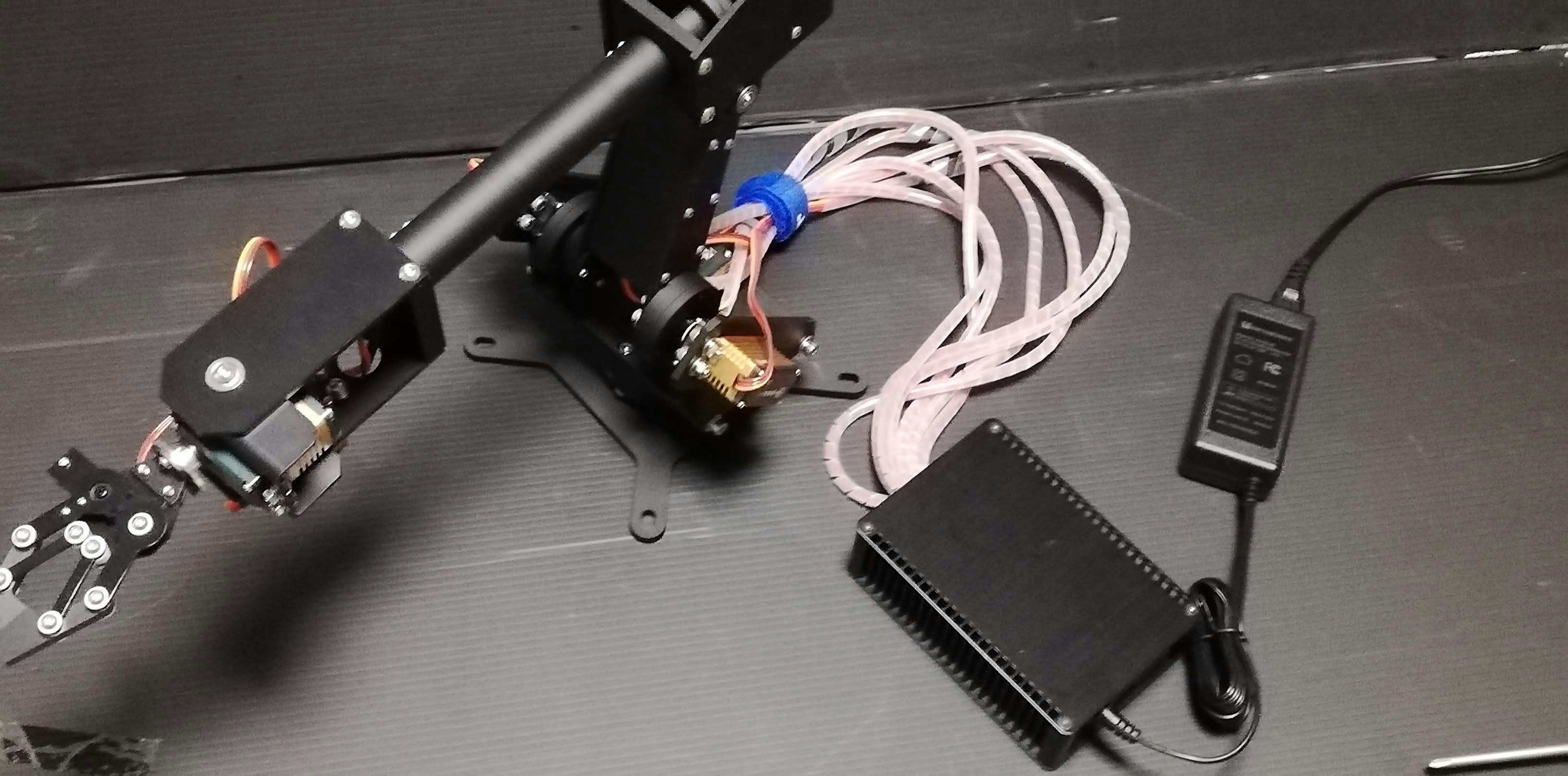
- TsukArm 本体
- コントローラ
- ACアダプタ+電源コード
- microUSB通信ケーブル
- レンチセット
- ドライバセット
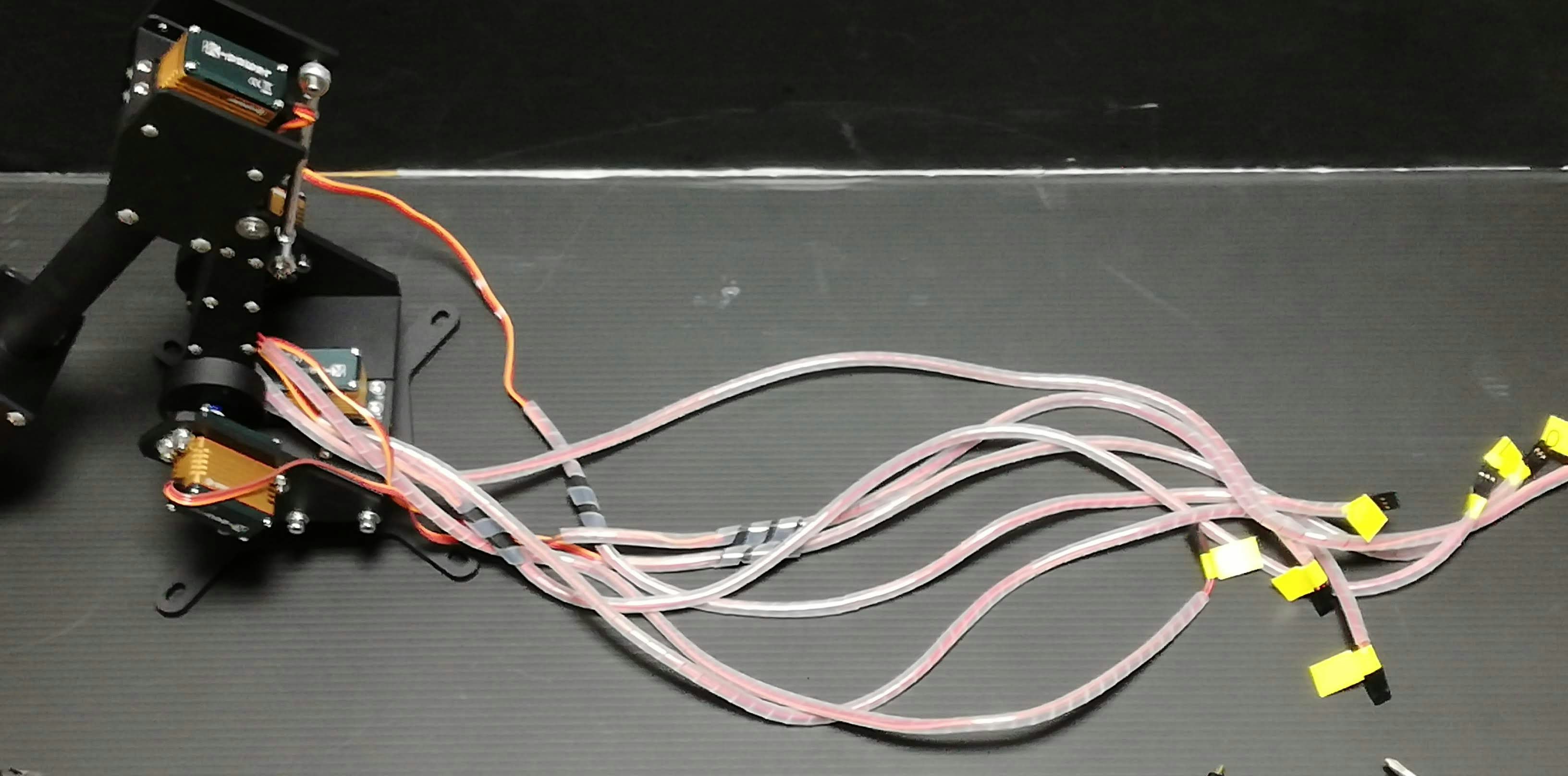
配線
モーターケーブルはこのくらい。まずはこれを配線します。
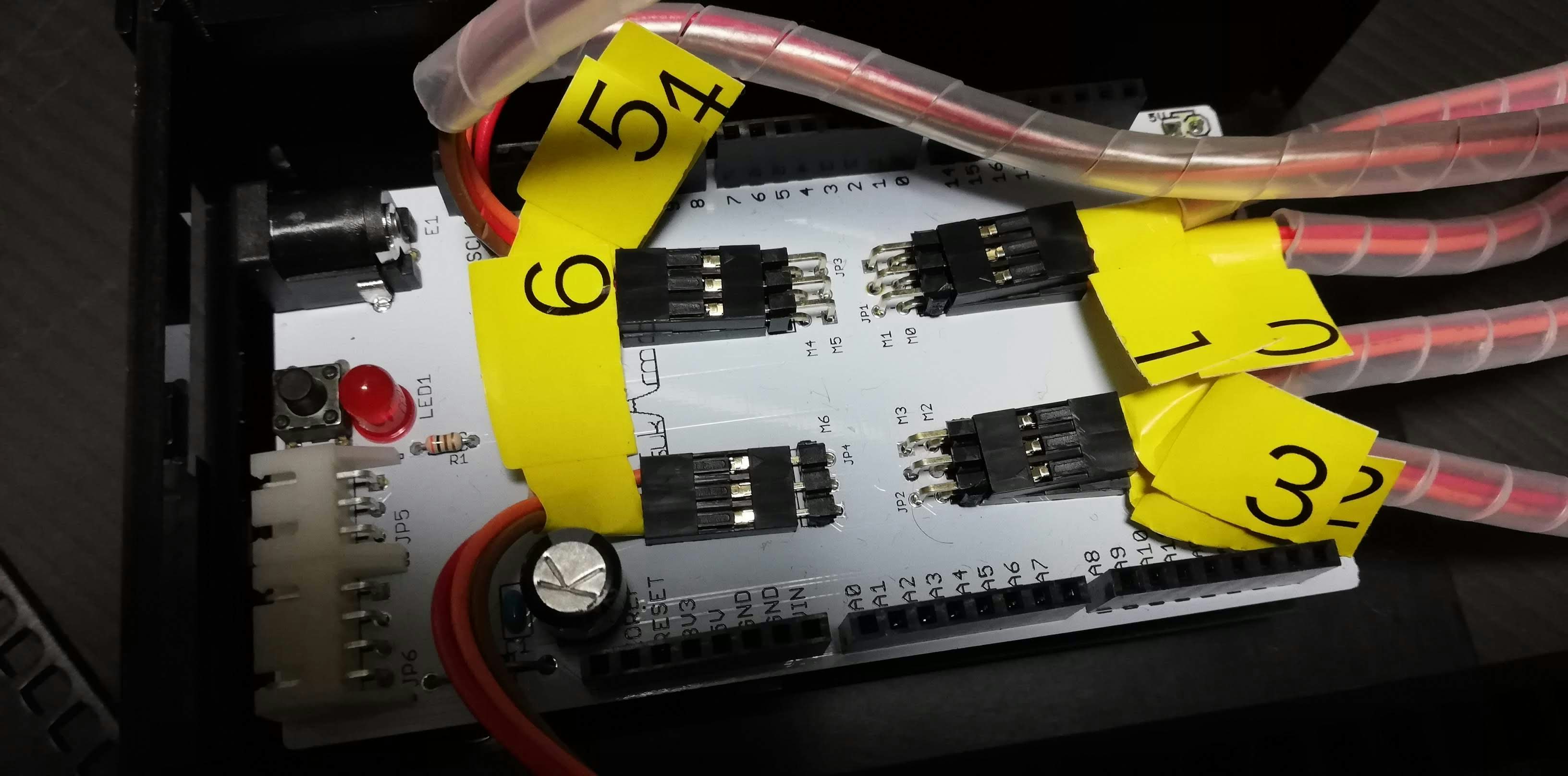
コントローラを開けて

このように差し込みます。コネクタは -,+,Pとあるが、それぞれ茶、赤、橙を接続。
火入れと調整
ACアダプタをつなげ、コンセントに差し込むとすぐに動作する。
急発進するので気をつけないといけない。
デモ動作は各モータを動作させます。それぞれが動作するかどうかチェック。
さて、元々付いている脚小さく、は何かに固定しないとそのままだと転げてしまった。
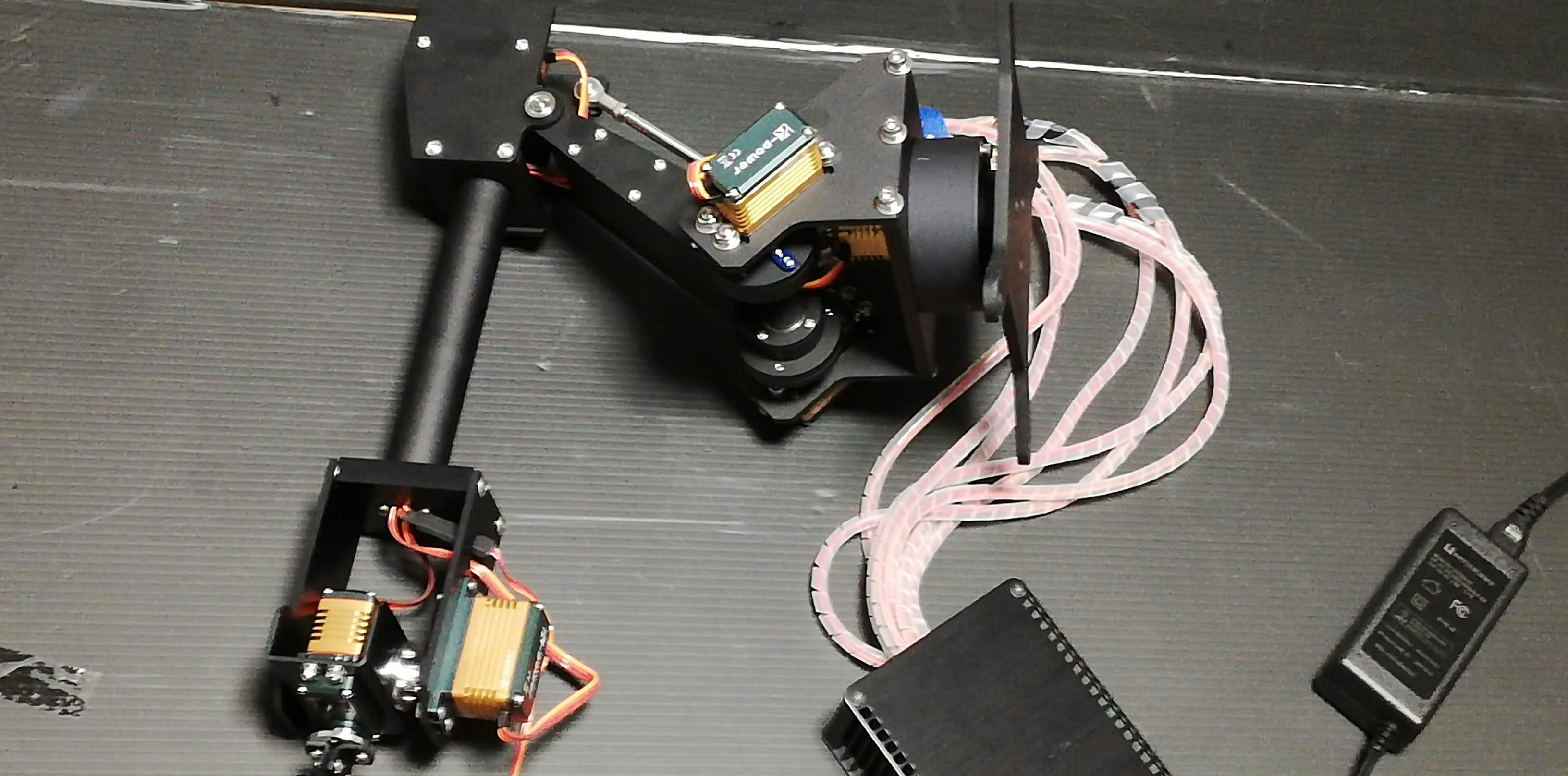
棚板を使って、テストベンチを作る。
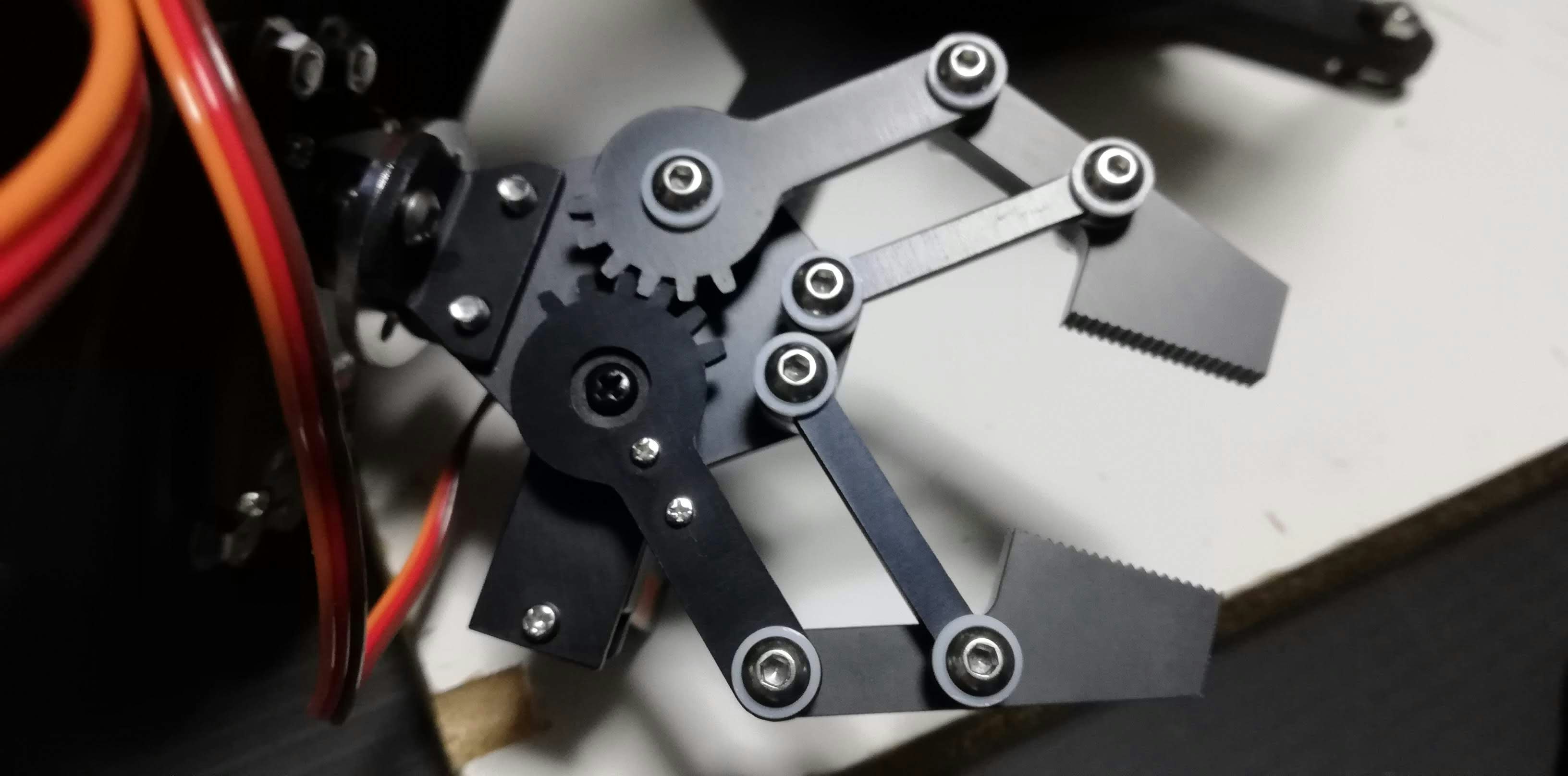
動かしたところ、先端のグリッパから結構うるさい音がする。キャリブレーションが必要ぽい。
ドライバを使ってグリッパを更に開き気味に調整してみるとちょうどよくなった。
PCに接続
次は、USBケーブルをPCに接続してプログラムを書き込んでみる。
サンプルプログラムはここ。
https://github.com/TsukArm/TsukArm-Library/blob/master/arduino_lib/tsukarm_sample/tsukarm_sample.ino
コントローラに使われているのはArduino Dueなので、こちら
http://wiki.tsukarm.com/Arduio%E9%96%8B%E7%99%BA%E7%92%B0%E5%A2%83%E6%A7%8B%E7%AF%89
を元にして環境設定。
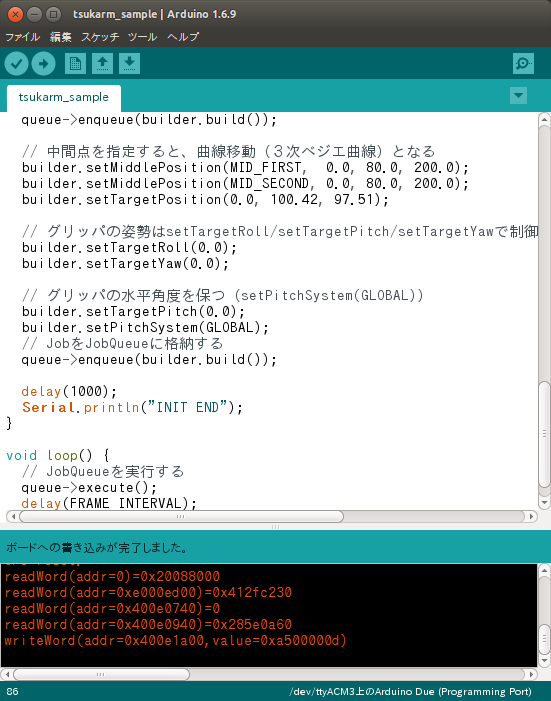
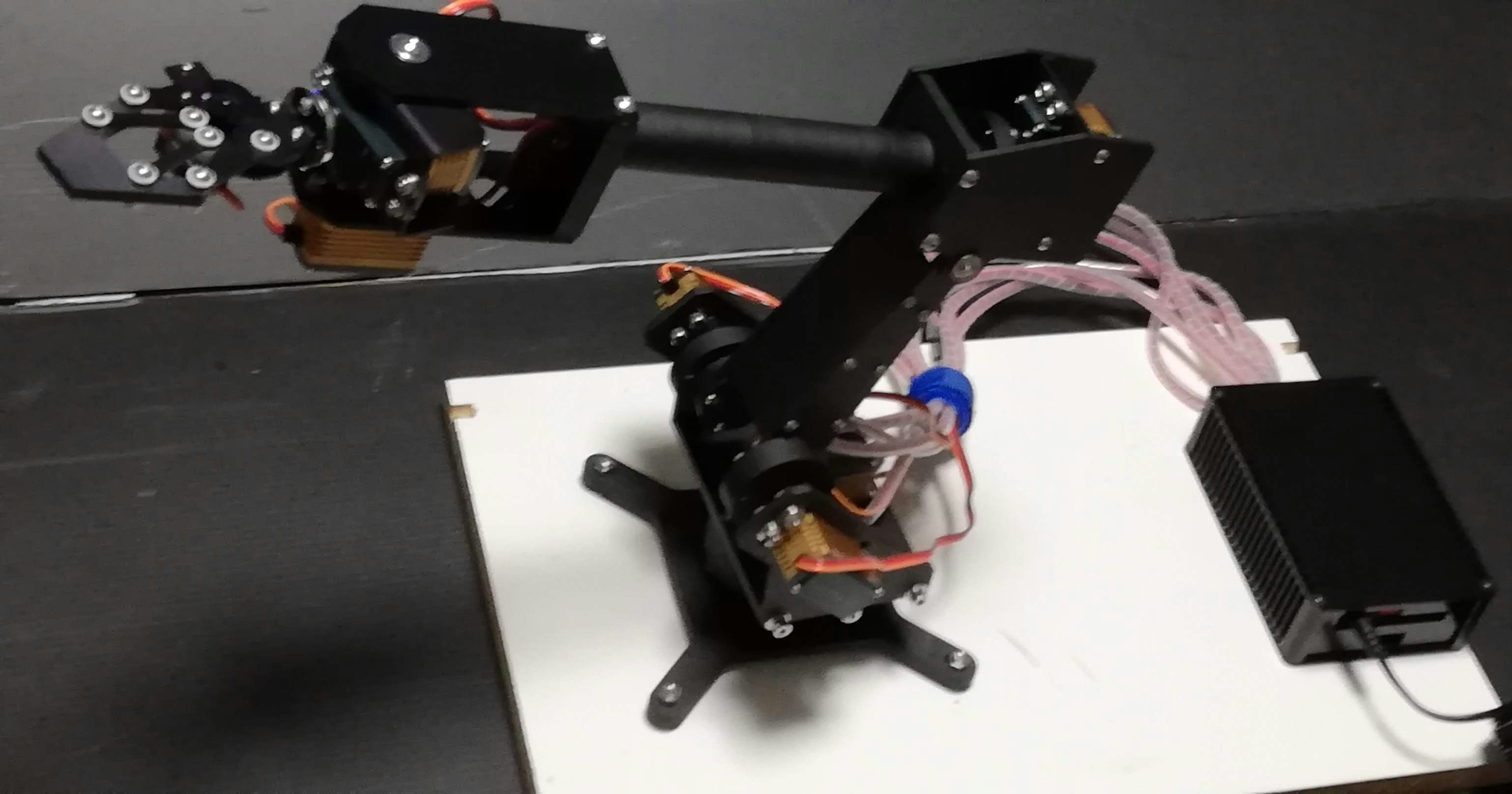
水平姿勢を保つようになる。
ここまででひとまずの動作確認はOKかな。