これは何?
NGK2024Sの発表資料です。
自己紹介
- 名前: 中西克典
- X(Twitter): @n_kats_
- 機械学習名古屋研究会主催
- NGK発表は2回目
機械学習名古屋研究会
- 論文読み会
- 毎月第3木曜(19:00~)オンラインで
- 次回(2月15日第71回)・・・https://machine-learning.connpass.com/event/308186/
本編
イントロ(研究会の表の目的)
- 論文を読む習慣付け
- 知識のアップデート
- 発展的・実践的な知見の獲得
イントロ(研究会の裏の目的)
この世の真理と呼べるものを全て知りたい。
という話を2年前のNGKでした。
おさらい(2年前の話)
- 読み上げソフトを使うと機械学習の論文が30分で再生できる。
- ある分野の概要を把握する目安の論文50本には約3日あればよい。
2年前の課題
- 読み上げられてる文章を目で追いかけないといけない。つらい。
- 読み上げにくい部分(図や数式)がある。
- 英語そのまま。
今や、LLMを使って思考プロセスをプログラミングする時代
- AIとコミュニケーションできるのは当たり前
- AIは多才(色んな知識・プログラミング・・・)
- みんなLLMで論文をまとめさせている
- 世の研究者は、思考プロセスを決めて多段階でLLMを使っている(CoT等)
(LLM=大規模言語モデル)
時は来た
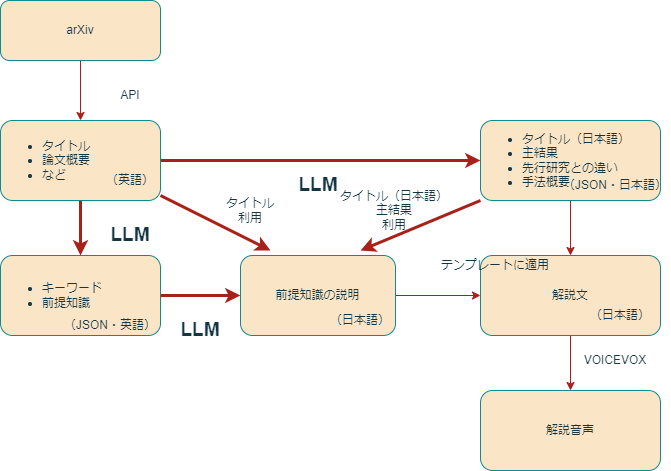
新手法
LLMでまとめて、音声化して散歩して聞く
- 論文の概要ページの内容をLLMで要約・解説(GPT-3.5)
- 要約・解説を音声化(VOICEVOXのずんだもん)
- 1日ごとにまとめての音声化
前手法との比較
| 手法 | 時間 | 情報量 | 言語 |
|---|---|---|---|
| 新手法 | 3分 | 概要+前提知識 | 日本語 |
| 前手法1 (全文読み上げ) |
30分 | 全文(過剰) | 英語 |
| 前手法2 (タイトル読み上げ) |
3秒 | タイトル(極少) | 英語 |
前手法との比較
- 日本語・適当な情報量になって聞きやすい。
- 机の前でじっと見ている必要がなくなった。
- 本文にない 前提知識の解説 もしていて、詳しくない分野でも学べる。
- 1つのカテゴリーなら、毎日全件聞ける規模(他に何もしなければ)
- ずんだもんの声がかわいい。
お値段・音声時間
2024/1/15のcs.AIのカテゴリーのケース(この週の平均くらい)。
| 論文数 | 合計値段 | 合計音声時間 | 1論文あたり値段 | 1論文あたり音声時間 |
|---|---|---|---|---|
| 82 | $0.49≒73円 | 3時間48分 | $0.006 | 2.8分 |
- 1カテゴリーなら 月2000円くらい (許容範囲?)
- 毎日複数カテゴリーを対象にすると使いすぎ
手法詳細
苦労ポイント
-
英単語が読めない。(VOICEVOXが対応していない。)
→ プロンプトの工夫と音声スピードの調整て誤魔化せているかも? -
JSONでない文字列が返ってくる場合がある。
→ 20回に1回くらいの頻度。気合修正と再生成で対処。用語にダブルクオートが含まれていたりするとやばい。 - 謎翻訳をする(GPT-3.5)
→ black hole を黒い穴と訳す。諦める。 -
数式
→ プロンプトの工夫でましになった?
分野間比較
| 分野(カテゴリー) | おすすめ度 | 特徴 |
|---|---|---|
| cs.AI,cs.CV | 〇 | 数が多いが、AIをやっていなくとも分かる部分が多くてよい(〇〇の分野に応用してみました系など)。 |
| cs.RO (ロボティクス) |
◎ | cs.AIよりも 実環境向けの研究が多くて特におすすめ。 |
| math.GT (幾何学的トポロジー) |
△ | 学生時代の研究分野。懐かしいが専門家向け。学生時代にあったらよかったというレベルは達成できたと思う。 |
| astro-ph.GA(銀河) | △ | 銀河の動きや衝突などを研究しているらしいことは分かった。星が謎の文字列で呼ばれるが、読み上げられても困る。 |
次にやりたいこと
- <選択> キーワードの優先度アルゴリズム・インターラクティヴな選択
-
<連鎖> 次のように芋づる式に解説を大量生産(本当に目指していたもの)
解説、テキスト → キーワード抽出 → 解説 → キーワード抽出・・・ - <概念整理> 複数の論文をまとめて抽象化・アブダクション。本文の高度な議論の抽出。
- <思考力> 抽出した概念を使って、専門的な問題を解かせる(AI支援下で解く)
俺たちの戦いはこれからだ(ご清聴ありがとうございました)
おまけ(詳細事例)
例(cs.RO)
title: Sample-efficient Reinforcement Learning in Robotic Table Tennis
URL: https://arxiv.org/abs/2011.03275
タイトル
サンプル効率の良いロボット卓球における強化学習
主要な結果。
強化学習(RL)は、さまざまなコンピューターゲームやシミュレーションで最近いくつかの印象的な成功を収めています。これらの成功のほとんどは、エージェントが学習できる大量のエピソードに基づいています。しかし、典型的なロボティクスの応用では、試行回数が非常に限られています。本論文では、テーブルテニスロボットの例を用いて、サンプル効率の良いRLアルゴリズムを提案します。卓球では、各打球は異なり、配置、スピード、スピンが異なります。従って、高次元の連続状態空間に依存した正確な返球を見つける必要があります。学習を数回の試行で可能にするために、この方法はロボットシステムに組み込まれています。これにより、ワンステップ環境を使用できます。状態空間は、打球時のボールの状態(位置、速度、スピン)に依存し、アクションは打球時のラケットの状態(方向、速度)です。加速学習のために、アクター・クリティックベースの確定的方策勾配アルゴリズムが開発されました。アプローチは、シミュレーションおよび実際のロボットでさまざまな困難なシナリオで競争力のある結果を提供します。$200$エピソード以下の訓練で事前トレーニングなしで正確な結果を得ることができます。実験を紹介するビデオは、https://youtu.be/uRAtdoL6Wpwで入手できます。
先行研究との違い。
従来の研究との違いは、この論文で提案された方法がサンプル効率の良いRLアルゴリズムであり、限られた試行回数で正確な結果を得ることができる点です。
必要な前提知識。
[前提知識]
1. 強化学習: エージェントが試行錯誤を通じて学習する機械学習の手法です。報酬を最大化するための行動を学習します。
2. 卓球: 小さいボールとパドルを使って行うスポーツです。
3. ロボティクス: ロボットを設計、制御、操作するための技術・科学の一分野です。
[説明するキーワード]
1. RLアルゴリズム: 強化学習の手法やアルゴリズムのことです。
2. テーブルテニスロボット: ロボットを用いた卓球のプレイヤーです。
3. 高次元の連続状態空間: 状態が多くの連続的な値で構成される空間のことです。例えば、ボールの位置や速度などが連続的に変化する状態空間です。
4. 環境: エージェントが学習する対象となるものや状況のことです。卓球の場合、テーブルやボールなどが環境となります。
5. 確定的方策勾配アルゴリズム: 強化学習において、方策(行動を決定するルール)を最適化するためのアルゴリズムの一種です。確定的方策は状態に対して確率的に行動を選ぶものではなく、決定的に行動を選ぶものです。
このようなキーワードの前提知識を持っていれば、論文を理解する上で大まかな説明が可能です。
例(math.GT)
title: The bridge number of satellite knots, links, and spatial graphs in the 3-sphere and lens spaces
URL: https://arxiv.org/abs/2401.01834
タイトル
3-球およびレンズ空間中の衛星結び目、結び目、および空間グラフのブリッジ数
主要な結果。
3-球またはレンズ空間での衛星結び目、結び目、または空間グラフ$T$を考える。$T$に対して共通の結び目$K$と包む回数$\omega$があるとすると、$K$がトーラス結び目でない場合、$b_1(T)\geq \omega b_1(K)$が示される。以前には$K$がトーラス結び目の場合の反例が知られている。これにより、Schubertの定理である$b_0(T) \geq \omega b_0(K)$の一般化も与えられる。また、$T$が「レンズ化された衛星」である場合や、$T$の成分をトーラスが分離する場合にも定理のバージョンを証明する。
先行研究との違い。
これまでの研究との違いは、トーラス結び目以外の場合の衛星結び目におけるブリッジ数の関係を示したことである。
必要な前提知識。
3-球およびレンズ空間中の衛星結び目、結び目、および空間グラフのブリッジ数に関する論文の要約です。
【キーワード1: 衛星結び目】
衛星結び目についての知識が必要です。衛星結び目は、結び目(結び目理論における特定の形状の結び目)であり、別の結び目で包まれたり、周りに回り込まれたりしている状態です。
【キーワード2: 結び目】
結び目についての知識が必要です。結び目とは、3次元空間内で交差しない閉曲線の集合です。結び目は数学的に研究され、そのトポロジー的性質や分類などが考えられます。
【キーワード3: 空間グラフ】
空間グラフに関する知識が必要です。空間グラフは、結び目の一種であり、頂点や辺が3次元空間内に配置されたグラフです。空間グラフは結び目やネットワークの性質を研究するために使用されます。
【キーワード4: 3-球】
3-球に関する知識が必要です。3-球とは、3次元ユークリッド空間における球のことで、表現としては半径1の球ではなく、半径が無限に広がった球です。
【キーワード5: レンズ空間】
レンズ空間に関する知識が必要です。レンズ空間は、特定のトポロジー的操作(レンズ空間の挿入)によって得られる3次元多様体です。レンズ空間は、結び目理論やトポロジー学の研究において重要なオブジェクトとして扱われます。
以上が、3-球およびレンズ空間中の衛星結び目、結び目、および空間グラフのブリッジ数に関する論文を読むために必要な前提知識の要点です。