Goその2アドベントカレンダーの記事です。
こんにちは、 @n0bisukeです。
前回GoでIoTっぽいことしてる記事を書きました。(GoからBLE制御でPLAYBULB Candleの操作をしてみる)
今日はGobotを使ってArduinoをGo言語で制御してサーボモータを回してみます。
(ちなみにタイトルは参考サイトの表現を真似しています笑)
環境
僕の環境はこんな感じです。
- Arduino uno
- サーボモータSG90
- Go1.5
- Mac OSX 10.10
サーボモータSG90
1個400円です。 http://amzn.to/1kaoapq

参考記事を元に線をつなげてみます。
- 茶色: GND
- 赤: 電源
- 黄: 信号
ということなので、Arduino側には
- 茶色: GND
- 赤: 5v
- 黄: DIGITAL 3ピン (任意の箇所でOKです)
こんな感じでつなげます。
接続イメージ
Mac ---(USB)--> Arduino -----> SG90
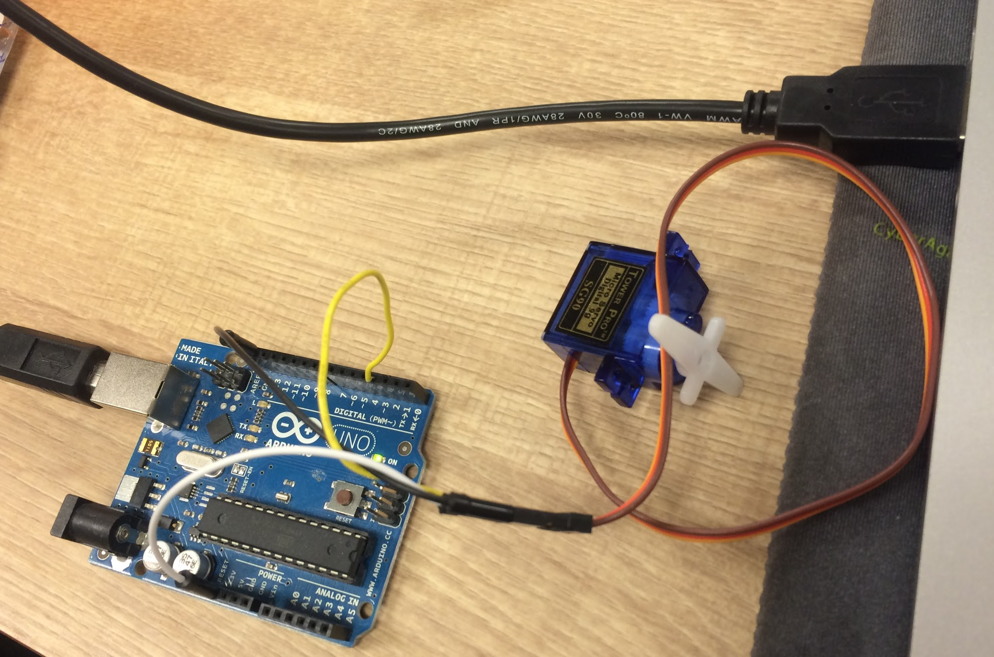
こんな感じの接続の仕方になります。
Gobotでサーボモータ制御
こちらにサンプルが載っています。
$ go get github.com/hybridgroup/gobot && go install github.com/hybridgroup/platforms/gpio
go getとinstallをしておきましょう。
MacとArduinoの接続ポートの確認
$ ls /dev/tty.*
/dev/tty.Bluetooth-Incoming-Port
/dev/tty.n0bisuke-WirelessiAP
/dev/tty.Bluetooth-Modem
/dev/tty.usbmodem1411
/dev/tty.Sphero-RRY-AMP-SPP
ここに出てくる/dev/tty.usbmodem1411が怪しいですね。この1411などの数字は自分の環境に合わせてください。サンプルで"/dev/ttyACM0"となってる部分を各自の環境に合わせて変更します。
servo.go
gpio.NewServoDriver(firmataAdaptor, "servo", "3")の3はピンの番号です。
サンプルでは3となっているので、そのまま3番ピンにSG90から伸びているオレンジ色の線をつなげてあげます。
servo.go
package main
import (
"fmt"
"time"
"github.com/hybridgroup/gobot"
"github.com/hybridgroup/gobot/platforms/firmata"
"github.com/hybridgroup/gobot/platforms/gpio"
)
func main() {
gbot := gobot.NewGobot()
firmataAdaptor := firmata.NewFirmataAdaptor("firmata", "/dev/tty.usbmodem1411")
servo := gpio.NewServoDriver(firmataAdaptor, "servo", "3")
work := func() {
gobot.Every(1*time.Second, func() {
i := uint8(gobot.Rand(180))
fmt.Println("Turning", i)
servo.Move(i)
})
}
robot := gobot.NewRobot("servoBot",
[]gobot.Connection{firmataAdaptor},
[]gobot.Device{servo},
work,
)
gbot.AddRobot(robot)
gbot.Start()
}
これでOKです。
あとは実行しましょう。
$ go run servo.go
こんな感じで毎秒ランダムにモーターが回るのが確認できると思います。
まとめ
GPIO制御が出来ると可能性広がりますね。
何気にサーボモータを操作したのは他の言語とか含めて初めてです。
(今まではセンサー類しか使ってなかった)
結局何を作るか考えてないのでアイディア募集します笑
それでは :)