概要
加速度センサーの値から速度と変位を求めるのは、
一筋縄ではいかないようです。
誤差などの問題もありますが、現在とっているアプローチを備忘録として記載します。
アプローチ
1.ローパスフィルターでノイズを取り除く
2.ハイパス・フィルターで重力加速度の影響を取り除く
3.加速度を積分して速度を出す
4.速度を積分して変位を出す
コード
main.cpp
# include <iostream>
int main(int argc, const char * argv[]) {
float data[5] = {0.218094, -0.001328, -0.001495, -0.002014, -0.000824};
int i = 0;
// ローパスフィルターの係数(これは環境によって要調整。1に近づけるほど平滑化の度合いが大きくなる)
float filterCoefficient = 0.9;
float lowpassValue = 0;
float highpassValue = 0;
// 時間差分
float timeSpan = 0.1;
// ひとつ前の加速度
float oldAccel = 0;
// 加速度から算出した速度
float speed = 0;
// ひとつ前の速度
float oldSpeed = 0;
// 速度から算出した変位
float difference = 0;
for (i = 0; i < 5; i++) {
// ローパスフィルター(現在の値 = 係数 * ひとつ前の値 + (1 - 係数) * センサの値)
lowpassValue = lowpassValue * filterCoefficient + data[i] * (1 - filterCoefficient);
// ハイパスフィルター(センサの値 - ローパスフィルターの値)
highpassValue = data[i] - lowpassValue;
// 速度計算(加速度を台形積分する)
speed = ((highpassValue + oldAccel) * timeSpan) / 2 + speed;
oldAccel = highpassValue;
// 変位計算(速度を台形積分する)
difference = ((speed + oldSpeed) * timeSpan) / 2 + difference;
oldSpeed = speed;
printf(" %f", difference);
}
}
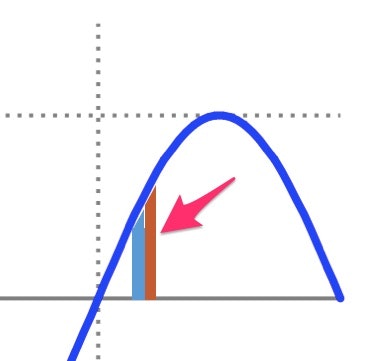
台形積分法
積分の計算方法のひとつです。
積分は、ざっくり言うと「グラフの曲線の面積を、細切れにして足し合わせることで算出する」という方法です。
台形積分法は、「あれ、細切れにしたら台形になるんじゃね?」ということで、
我々になじみの深い台形の面積を出して、足し合わせることで積分する方法です。
台形の面積の公式は、
** (上辺 + 下辺) × 高さ / 2 **
ですね!