システム
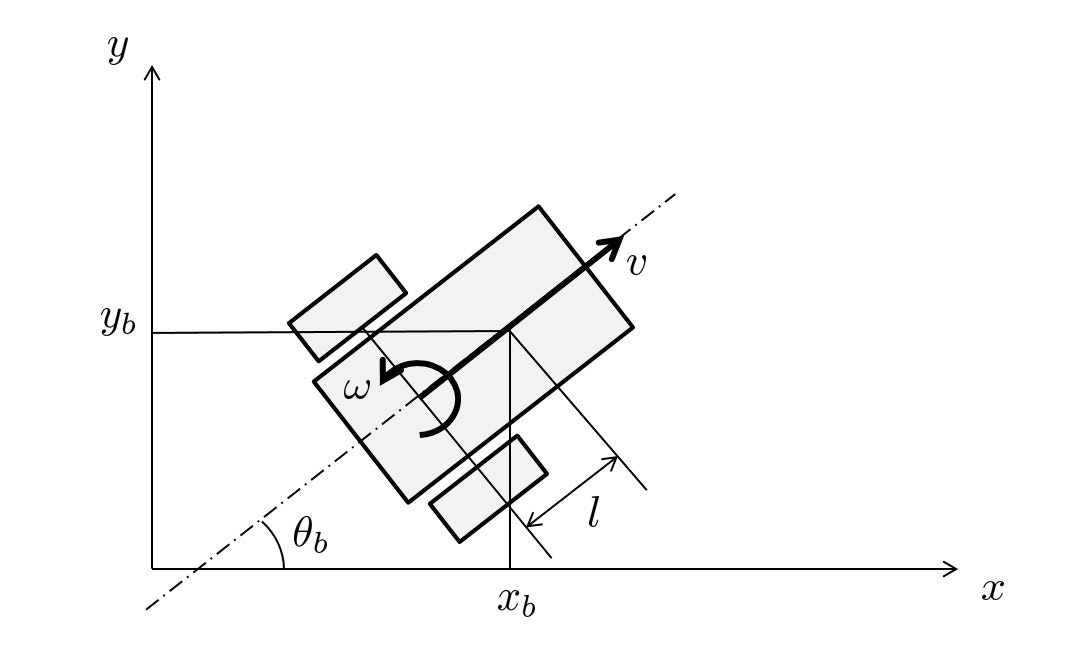
移動体の制御点の位置を $\boldsymbol{x}$,入力を $\boldsymbol{u}$ として,以下のように定義する.
\begin{align}
\boldsymbol{x_b} =
\begin{bmatrix}
x_b & y_b
\end{bmatrix}^\mathrm{T}
\qquad
\boldsymbol{u} =
\begin{bmatrix}
v & \omega
\end{bmatrix}^\mathrm{T}
\end{align}
$\boldsymbol{x_b}$ と $\boldsymbol{u}$ の関係は,移動体の姿勢(ヨー角)を $\theta_b$,移動体の回転中心から制御点の距離を $l_b$ として,
(簡単のため,移動体の回転中心と制御点は機体の中心軸にあるとする)
\begin{align}
\begin{bmatrix}
v \\
l \omega
\end{bmatrix}
=
\begin{bmatrix}
cos \theta_b & sin \theta_b \\
- sin \theta_b & cos \theta_b
\end{bmatrix}
\begin{bmatrix}
\dot{x}_b \\
\dot{y}_b
\end{bmatrix}
\end{align}
制御
目標位置を $\boldsymbol{x_b^d} = \begin{bmatrix} x_b^d & y_b^d \end{bmatrix}^\mathrm{T}$,目標速度を $\boldsymbol{\dot{x}_b^d} = \begin{bmatrix} \dot{x}_b^d & \dot{y}_b^d \end{bmatrix}^\mathrm{T}$ とすると,
\begin{align}
\begin{bmatrix}
v \\
l \omega
\end{bmatrix}
=
\begin{bmatrix}
cos \theta_b & sin \theta_b \\
- sin \theta_b & cos \theta_b
\end{bmatrix}
\left(
K_d
\begin{bmatrix}
\dot{x}_b^d \\
\dot{y}_b^d
\end{bmatrix}
- K_p
\begin{bmatrix}
x - x_b^d \\
y - y_b^d
\end{bmatrix}
\right)
\end{align}
として,PD制御する.