ぐるぐる動くよ
概要
-
MPU-9250というセンサーを ラズパイにI2Cで接続してみる。 - 参考: How to Setup the MPU-9250 on a Raspberry Pi
-
RTIMULib2というライブラリを使って、そのデモを見る。
ちなみに、Please note that this project is no longer active.だそうで、開発終了、でしょうかね。 - IMU = Inertial Measurement Unit (慣性計測装置) ??
イナーシャルキャンセラー、全開。??
環境
- Raspberry Pi 2 Model B
2016-05-27-raspbian-jessie.img- Invensense MPU-9250 (ebay.comとかでホンコンから、5~6ドルくらい? 忘れたころに届いた)
手順
-
MPU-9250を接続。I2Cは、線4本
VCC(3.3V)、GND、SCL、SDA。(ものによっては、CSを3.3Vへ。) -
デモで、Xを使うようなので、通常のraspbian-jessieを使用。
いつもの
sudo apt-get update
sudo apt-get upgrade
sudo apt-get install -y byobu htop samba ## お好みで
3. 追加パッケージ
```bash:追加パッケージ
sudo apt-get install -y i2c-tools cmake git octave python-dev libqt4-dev
-
sudo raspi-config
I2Cを使う設定に。
9 Advanced Options > A6 I2C > Yes -
sudo vi /boot/config.txt/boot/config.txt_追加する
...
dtparam=i2c1_baudrate=400000
5. `sudo vi /etc/udev/rules.d/90-i2c.rules`
```txt:/etc/udev/rules.d/90-i2c.rules
KERNEL=="i2c-[0-7]",MODE="0666"
-
sudo reboot
再起動 -
i2cdetect -y 1
デバイスを認識しているか?0x68が出た?
pi@raspberrypi:~ $ i2cdetect -y 1
0 1 2 3 4 5 6 7 8 9 a b c d e f
00: -- -- -- -- -- -- -- -- -- -- -- -- --
10: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
20: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
30: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
40: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
50: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
60: -- -- -- -- -- -- -- -- 68 -- -- -- -- -- -- --
70: -- -- -- -- -- -- -- --
pi@raspberrypi:~ $
7. RTIMULib2のビルド
```
cd
git clone https://github.com/richards-tech/RTIMULib2.git
mkdir RTIMULib2/Linux/build
cd RTIMULib2/Linux/build
cmake ..
make -j4
-
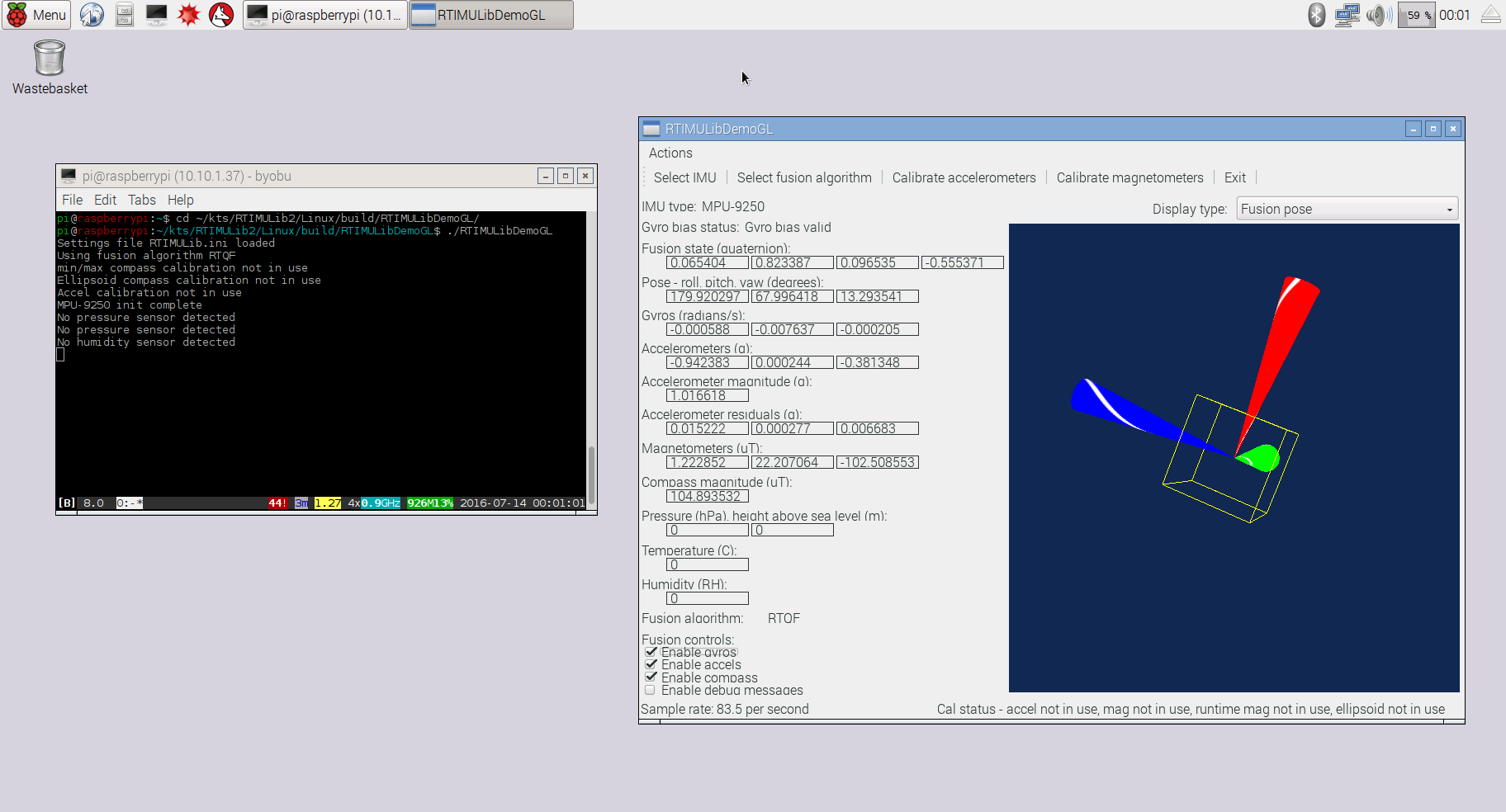
RTIMULibDemoGL デモの実行
cd ~/RTIMULib2/Linux/build/RTIMULibDemoGL
./RTIMULibDemoGL
<br>

### Python バインディング
1. ビルド・インストール
```shell-session
cd
cd ~/RTIMULib2/Linux/python
python setup.py build
sudo python setup.py install
-
サンプル
Fusion.pyを実行
cd
cd ~/RTIMULib2/Linux/python/tests
python Fusion.py
```py:Fusion.pyのメインループの部分。
...
while True:
if imu.IMURead():
# x, y, z = imu.getFusionData()
# print("%f %f %f" % (x,y,z))
data = imu.getIMUData()
fusionPose = data["fusionPose"]
print("r: %f p: %f y: %f" % (math.degrees(fusionPose[0]),
math.degrees(fusionPose[1]), math.degrees(fusionPose[2])))
time.sleep(poll_interval*1.0/1000.0)
-
表示例
pi@raspberrypi:~/RTIMULib2/Linux/python/tests $ python Fusion.py
Using settings file RTIMULib.ini
Settings file does not exist, will be created
IMU Name: MPU-9250
IMU Init Succeeded
Recommended Poll Interval: 4mS
r: -13.623389 p: 18.087236 y: -157.539734
r: -15.078542 p: 13.615657 y: -155.698479
r: -17.162211 p: 9.444151 y: -154.067935
r: -20.069331 p: 5.452485 y: -152.632844
r: -24.085829 p: 1.261949 y: -151.502680
r: -29.675574 p: -2.659780 y: -151.203285
r: -36.056415 p: -6.144597 y: -150.940009
r: -42.588142 p: -8.521807 y: -150.505049
r: -47.347961 p: -11.855518 y: -143.940581
r: -53.580303 p: -13.259552 y: -143.910050
r: -59.725537 p: -14.393150 y: -143.855190
r: -65.340165 p: -14.693897 y: -144.329574
r: -70.261821 p: -14.738734 y: -145.301906
r: -74.317014 p: -14.802757 y: -146.801051
r: -77.447959 p: -14.661696 y: -148.575780
r: -78.309102 p: -14.618659 y: -144.192779
r: -79.242762 p: -13.868489 y: -139.769317
r: -79.927195 p: -12.702007 y: -135.382600
r: -80.395718 p: -11.533799 y: -131.017385
r: -80.965821 p: -10.382536 y: -126.841995
r: -83.190119 p: -9.506169 y: -121.918590
^CTraceback (most recent call last):
File "Fusion.py", line 44, in
time.sleep(poll_interval*1.0/1000.0)
KeyboardInterrupt
pi@raspberrypi:~/RTIMULib2/Linux/python/tests $
### キャリブレーション
- `octave`は、キャリブレーションのために、使用される模様。
- サンプルを実行すると、`RTIMULib.ini`というファイルが生成されるので、そいつをいったんコピーして、キャリブレーションして、元のとこにコピーする、、んだとおもう。
```bash
cd
cd RTIMULib2/Linux/RTIMULibCal/
make -j4
sudo make install
# sudo make uninstall もあるヨ。
#
cp -r /home/pi/RTIMULib2/RTEllipsoidFit/ /home/pi/
cd /home/pi/RTEllipsoidFit/
# 設定をコピーしてきて、あとで、もどす?
# cp ~/RTIMULib2/Linux/build/RTIMULibDemoGL/RTIMULib.ini .
#
RTIMULibCal
-
mを押して、なにかキーを押して、ぐるぐる回して、数字が変わらなくなったら、sでセーブ。(rでリセット、xで中止。) -
sを押して、なにかキーを押して、自動でとまるまで 、ぐるぐる回す。(xで中止。) -
aをおして、- x軸、
eをおして、ぐるぐる。' - y軸、
eをおして、ぐるぐる。' - z軸、
eをおして、ぐるぐる。' - うまいとこで、
sでセーブ。(rでリセット、xで中止。)
- x軸、
-
xをおしてキャリブレーション終了
=>RTIMULib.iniが更新されてるはず。
その他
-
簡単なサンプルみれば使い方わかるね。
pi@raspberrypi:~ $ ~/RTIMULib2/Linux/build/RTIMULibDrive/RTIMULibDrive
Settings file not found. Using defaults and creating settings file
Detected MPU9250 at standard address
Using fusion algorithm RTQF
min/max compass calibration not in use
Ellipsoid compass calibration not in use
Accel calibration not in use
MPU-9250 init complete
Sample rate 84: : roll:59.973343, pitch:83.228676, yaw:-122.156759
- `cat ~/RTIMULib2/Linux/RTIMULibDrive/RTIMULibDrive.cpp`
```cpp:RTIMULibDrive.cpp
////////////////////////////////////////////////////////////////////////////
//
// This file is part of RTIMULib
//
// Copyright (c) 2014-2015, richards-tech, LLC
//
// Permission is hereby granted, free of charge, to any person obtaining a copy of
// this software and associated documentation files (the "Software"), to deal in
// the Software without restriction, including without limitation the rights to use,
// copy, modify, merge, publish, distribute, sublicense, and/or sell copies of the
// Software, and to permit persons to whom the Software is furnished to do so,
// subject to the following conditions:
//
// The above copyright notice and this permission notice shall be included in all
// copies or substantial portions of the Software.
//
// THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR IMPLIED,
// INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS FOR A
// PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR COPYRIGHT
// HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER IN AN ACTION
// OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN CONNECTION WITH THE
// SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.
# include "RTIMULib.h"
int main()
{
int sampleCount = 0;
int sampleRate = 0;
uint64_t rateTimer;
uint64_t displayTimer;
uint64_t now;
// Using RTIMULib here allows it to use the .ini file generated by RTIMULibDemo.
// Or, you can create the .ini in some other directory by using:
// RTIMUSettings *settings = new RTIMUSettings("<directory path>", "RTIMULib");
// where <directory path> is the path to where the .ini file is to be loaded/saved
RTIMUSettings *settings = new RTIMUSettings("RTIMULib");
RTIMU *imu = RTIMU::createIMU(settings);
if ((imu == NULL) || (imu->IMUType() == RTIMU_TYPE_NULL)) {
printf("No IMU found\n");
exit(1);
}
// This is an opportunity to manually override any settings before the call IMUInit
// set up IMU
imu->IMUInit();
// this is a convenient place to change fusion parameters
imu->setSlerpPower(0.02);
imu->setGyroEnable(true);
imu->setAccelEnable(true);
imu->setCompassEnable(true);
// set up for rate timer
rateTimer = displayTimer = RTMath::currentUSecsSinceEpoch();
// now just process data
while (1) {
// poll at the rate recommended by the IMU
usleep(imu->IMUGetPollInterval() * 1000);
while (imu->IMURead()) {
RTIMU_DATA imuData = imu->getIMUData();
sampleCount++;
now = RTMath::currentUSecsSinceEpoch();
// display 10 times per second
if ((now - displayTimer) > 100000) {
printf("Sample rate %d: %s\r", sampleRate, RTMath::displayDegrees("", imuData.fusionPose));
fflush(stdout);
displayTimer = now;
}
// update rate every second
if ((now - rateTimer) > 1000000) {
sampleRate = sampleCount;
sampleCount = 0;
rateTimer = now;
}
}
}
}