はじめに 制振制御とは
世の中に存在する大抵のものは、何かしらのばね特性を有しています。
つまり、ぱっと見はそうは見えなくても、実態としては下記のようにモデリングされます。
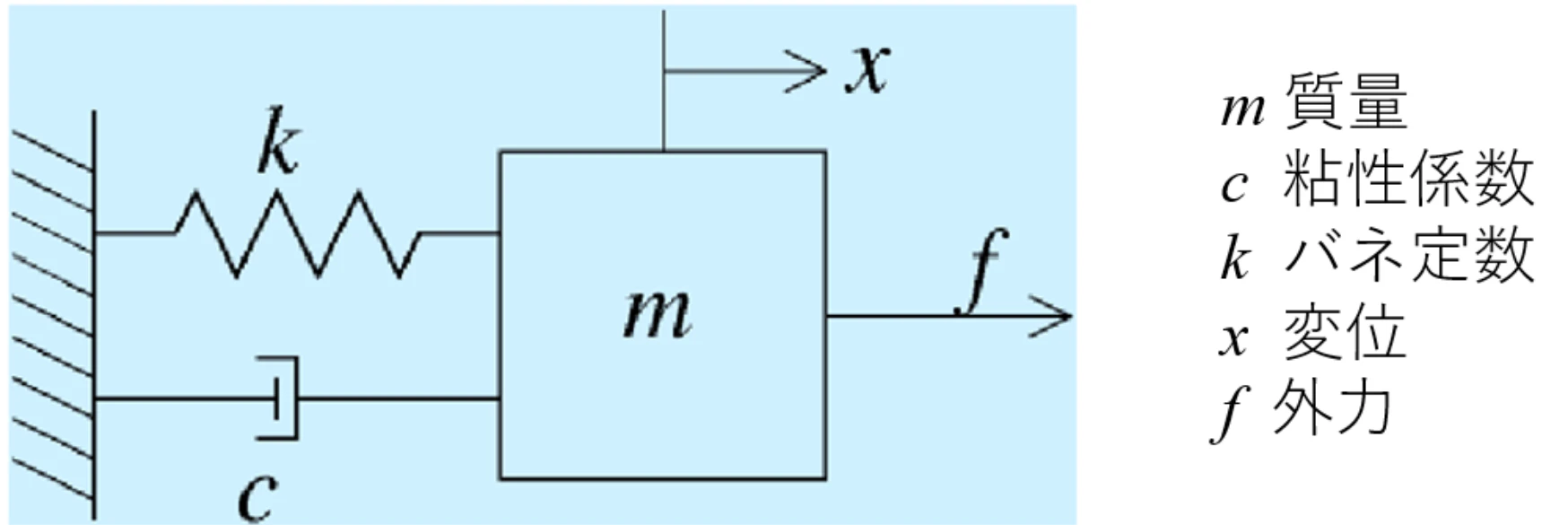
このような構造物は下記の周波数Fで共振(ぐらぐら、ブルブル)します。
F=2\pi\sqrt{\frac{m}{k}} (Hz)
このため、ビシっと止めるのが難しい特徴があります。
これをビシっと止めるのが制振制御です。
長々と説明するより、動画を見た方が早いので早速行きましょう。
門外漢にも興味を持っていただきたいので、第一位から行きます!
(下記、独断と偏見でランキングしています。ご意見あればコメントにてお願い致します。また著者はいずれの企業・関連団体にも属さない、異業種の技術者です。
なお技術の中身が気になる方は、ページの最後を参照下さい)
コンテスト第1位
三菱電機 アドバンスト制振制御Ⅱ
エモさ ★★★★★
分かり易さ ★★★★★
残留振動 ★★★☆☆
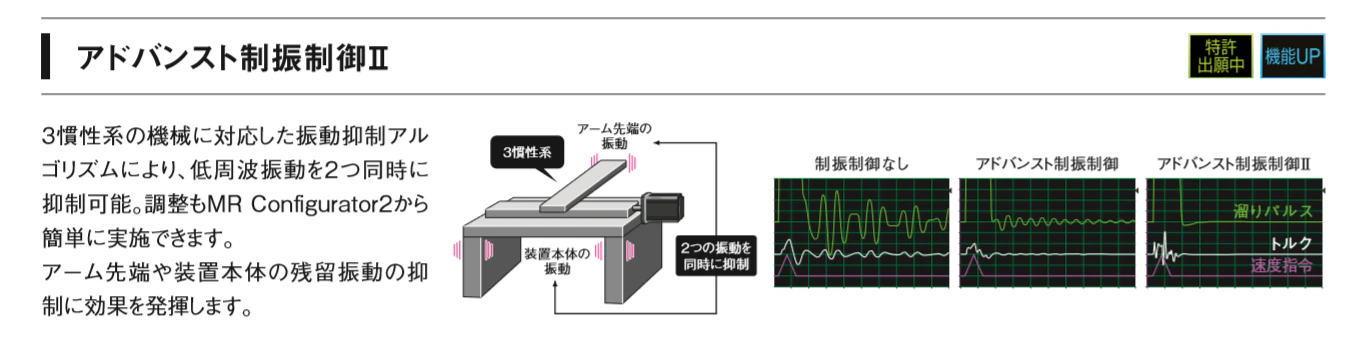
堂々の第一は総合電機メーカーの雄、三菱電機です!おめでとうございます!
他の動画を圧倒して『制振制御』が何なのか分かり易かったことが高評価に繋がりました。また共振周波数がいくつなのか明記しているのも好感が持てます。制振なし⇒制振あり①⇒制振あり②と、流れるような説明方法も素晴らしい。
制御そのものの凄さとしては、帯域がわずか数Hzの差の2つの周波数を個別に制振できている点が非常にポイント高く、このことが制御屋としてエモさを感じる要素になっています。
残留振動(ビシっと止めた後に残る振動)が少し気になりますが、そこそこ加速度が高いように伺えるのでご愛敬の範囲内と思います。
審査員特別賞
オムロン 「制振制御」カクテルグラス編

エモさ 計測不能
分かり易さ ★★☆☆☆
残留振動 ★★★★★
いきなりここで審査員特別賞かよ、と思われるかも知れませんが、あまりにも面白かったのでここで紹介します。
実を言うとこの動画はコンテストの採点中に新たに見つかったもので、記事に入れるか悩みましたが『制御って面白い!』という人を増やしたいため、急遽入れました。
本記事の最後に書きますが、この動画に使われている技術は他の動画で使われている技術と基本的には同じものです。しかしながら、見せ方によってこんなにも変わるということを強調したいです。みんなもこういう動画作ろう。
コンテスト第2位
オムロンの制振制御 複数ピンポン玉編

エモさ ★★★★★
分かり易さ ★★☆☆☆
残留振動 ★★★★★
第2位は温度計のイメージが強いが実は制御に強いメーカー、オムロンです!おめでとうございます!
恐らく、微妙に異なる5つの共振周波数を同時に抑制しているので制御そのものは凄いのです。しかしながら複数のピンポン玉に目が行ってしまい、肝心の制振制御に着目しにくことが理由で2位となりました。
きっちり共振周波数を書いてくれていれば、さらには5つの共振周波数をどう抑制しているのか(1つのノッチでざっくり処理しているのか、5つのノッチできっちり処理しているのか)が伝わる内容であったら1位は取れたかと。惜しい!
なおオムロンは制振制御に力を入れているらしく、色々な制振制御動画が配信されています。
下記1例ですが、興味のある方はチェックしてみて下さい。
オムロンの制振制御 液体搬送時のこぼれ(水コップ編)
オムロンの制振制御 ワーク搬送時のずれ
オムロンの制振制御 複合構造の揺れ
コンテスト第3位
山洋電気 制振制御デモンストレーション

エモさ ★★★☆☆
分かり易さ ★★★☆☆
残留振動 ★★★★★
第3位は今やサンヨウといえば山洋、の山洋電気です!おめでとうございます!
制振あるなしの比較が左右で比較されていること、アプリケーションが電子基板と具体的であることが分かり易さに繋がってはいますが、動画が短いこともあり視聴者への訴えが弱いため3位となってしまいました。
共振抑制も恐らく複数対応できるとは思うのですが、動画では1つの周波数を抑制できていることしか訴えられていないことも弱いです。
コンテスト第4位
安川電気 Σ-7 振動抑制機能デモ

エモさ ★★★☆☆
分かり易さ ★★★★★
残留振動 ★★★☆☆
ロボットつよつよといえばファナックかここ、安川電気は第4位になってしまいました。残念。
システム構成を詳細に説明してくれている点は他の動画にない、素晴らしい要素ではありますがFA関連の人向けの展示感が否めず、エモさが低くなってしまいました。
また意図しない結果であるとは思うのですが、制振なしの重りの振動が、制振ありの重りのほうに伝播してしまっています。
なお面白いことに、この伝播を抑制する技術研究というのも世の中では行われています。
「テーブル間干渉を有するシステムのモデル化とモデルベースフィードフォワード補償」
そういう観点では、上記動画も見どころ満載と言えなくもないです。
技術的解説
上記4つの動画ですが、基本的には下記のような技術によって実現されていると思われます。(あくまで著者の想像なので、違ったらごめんなさい)
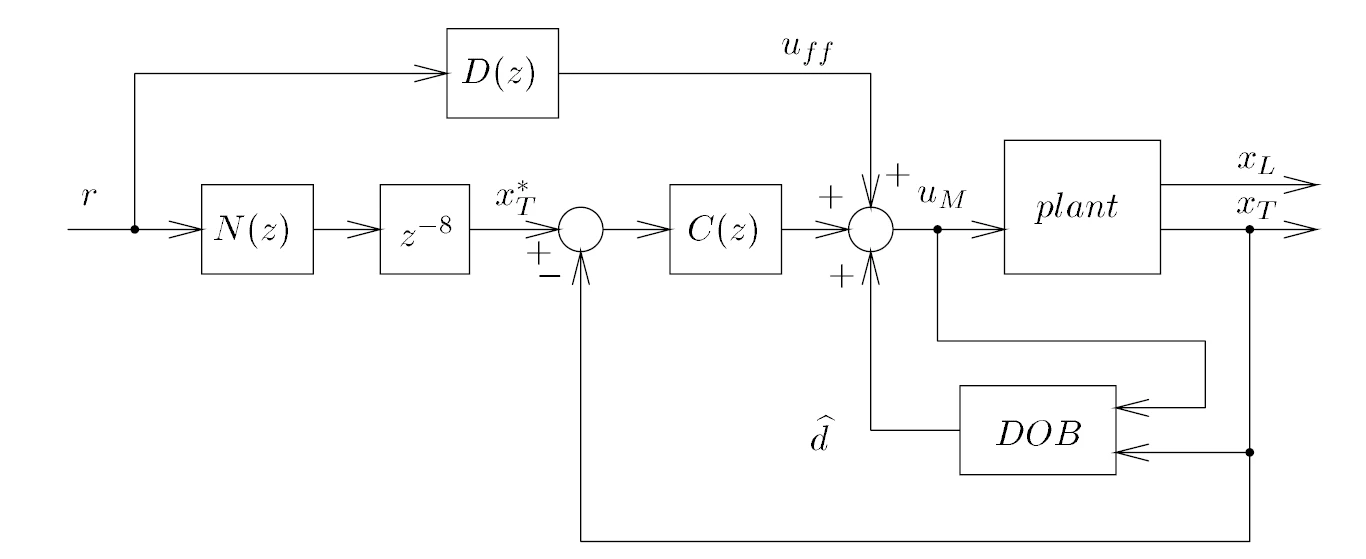
引用元:前田佳弘 転がり案内を有する位置決め機構に対する摩擦モデリングと補償 p.201より。
rは負荷を乗せた台が目標とする位置、xはrに到達する目標軌道、xTは実際の台の軌道です。じゃあxLは何かというと負荷の軌道で、第1位の動画で言うところの重り、第2位の動画で言うところのピンポン玉の軌道になります。
制御の目的は負荷の軌道xLをビシっと制御することですが、負荷に位置センサは付けず台の軌道xTだけをフィードバックする条件下でxLをビシっと制御します(いわゆるセミクローズド制御)。またさらに厳密に言うとxTも直接計測しておらず、ACサーボの回転角θ(deg)をセンサ(光学式エンコーダ)にて取得、ACサーボが1回転したときに台が進む距離をpとしてxT=p×θ/360 とみなして制御を行います。
ブロック図の詳細については上記の論文を参照して頂くとして、ざっくり説明すると形としては2自由度制御になります。制振の秘訣はD(z)とN(z)にあって、いずれも制御対象であるプラントの共振周波数をうまく避けて制御するように設計されています。
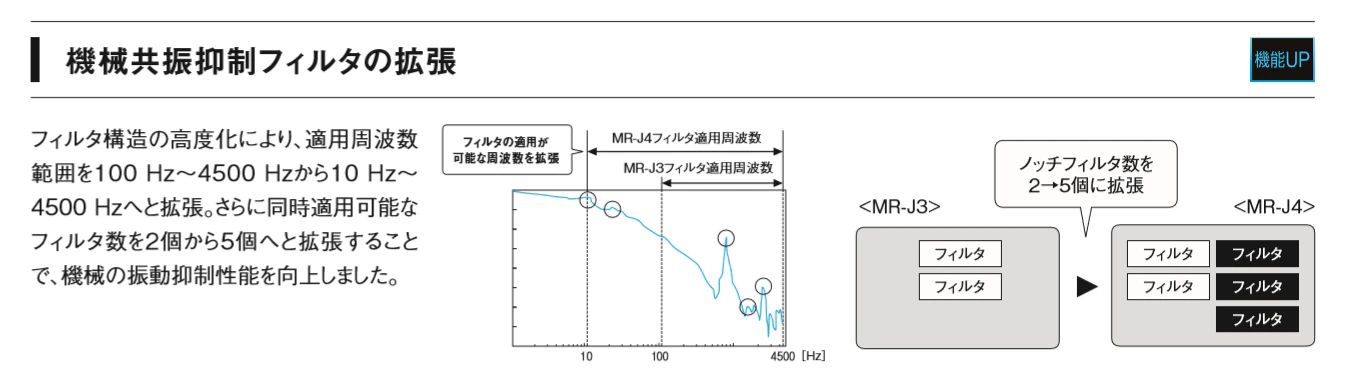
なお三菱電機のカタログによれば、制振制御を行っているのは2つの共振周波数までで、3つ以上の共振周波数はノッチフィルタにて対処しているようです。
第1位の動画は上の機能のみの説明を行ったものなので、第2位の動画のような、2つ以上の共振周波数の場合はノッチフィルタで対応可能なものと推測されます。
ちなみにですが、過去に展示会にて上記4社のうち1社に対して「御社の制振と競合の制振、どっちが強い?」と大変失礼な質問をしたところ、対象によってまちまちという回答が得られました。
つまり、柔軟梁に関してはA社に優位性があるが、液体に関してはB会に優位性があるというように、題材によって優劣が変わるそうです。
制振制御の世界もなかなか奥が深いですね。