本章のながれ
本章ではLiDARの概要について触れた後、実際に使ってみるところまでを記載致します。
実施環境
OS : Ubuntu16.04LTS. , Ubuntu18.04LTS.
ROS環境 : kinetic , melodic
対象PC :LattepandaAlphaによる動作(Intel Core m3-7y30 程度の動作)を想定
1. LiDARとは
LiDARとは“Light Detection and Ranging、Laser Imaging Detection and Ranging、「光検出と測距」ないし「レーザー画像検出と測距」光を用いたリモートセンシング技術の一つで、レーザーをパルス状に照射し、その散乱光による反射時間(発光後に反射光を検出するまでの時間)から距離を算出する技術です。 以前までは価格が高く、個人として購入することが難しいセンサでしたが、$100程度で購入できるLiDARセンサも出てきており、その中でも今回ご紹介するRPLiDARは取り扱いも簡単なうえ、価格も比較的安く個人でも何とか購入できるセンサとなります。更にライブラリも多くあるため安心して使いこなせるLiDARセンサとなっています。
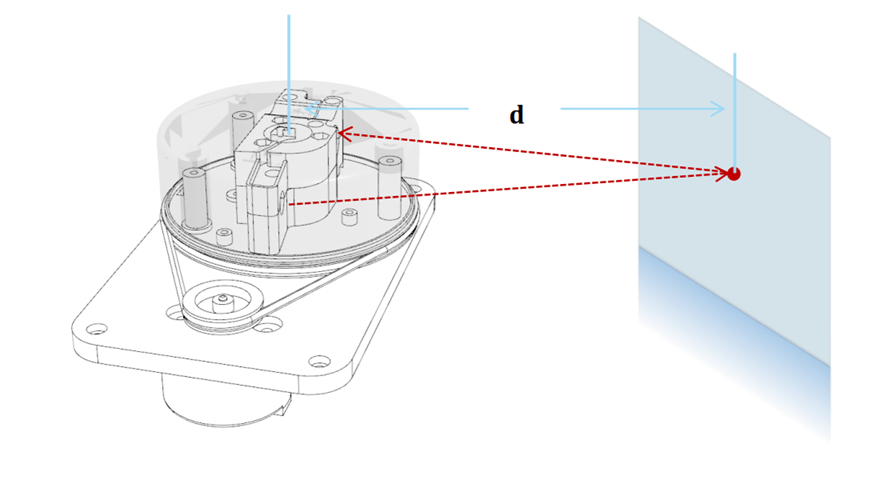
SLAMTECより参照
2. LiDARを使ってみよう
RPILDARをROSで動かす際、以下のページがとても参考になりました。初めてROSで動かしたのもこのノードからでした!安心して動かせるので頼もしいです!
空飛ぶロボットのつくりかた RPLIDAR A1をROSで動かしてみる
ここの内容とほぼ同じですが、以下のコマンドを一行ずつ実行していけば、初めてROSをインストールして使おうとしている人でも動かせるはずです。
cd ~/catkin_ws/src
git clone https://github.com/Slamtec/rplidar_ros.git
cd ..
catkin_make
source devel/setup.bash
sudo chmod 666 /dev/ttyUSB0
roslaunch rplidar_ros view_rplidar.launch
3. LiDARを使う時、向きってあるの?
ここで一つ、、、$\huge{後悔しないRPLIDAR A1の取り付け方向}$についてお教えします。
この向きです!!
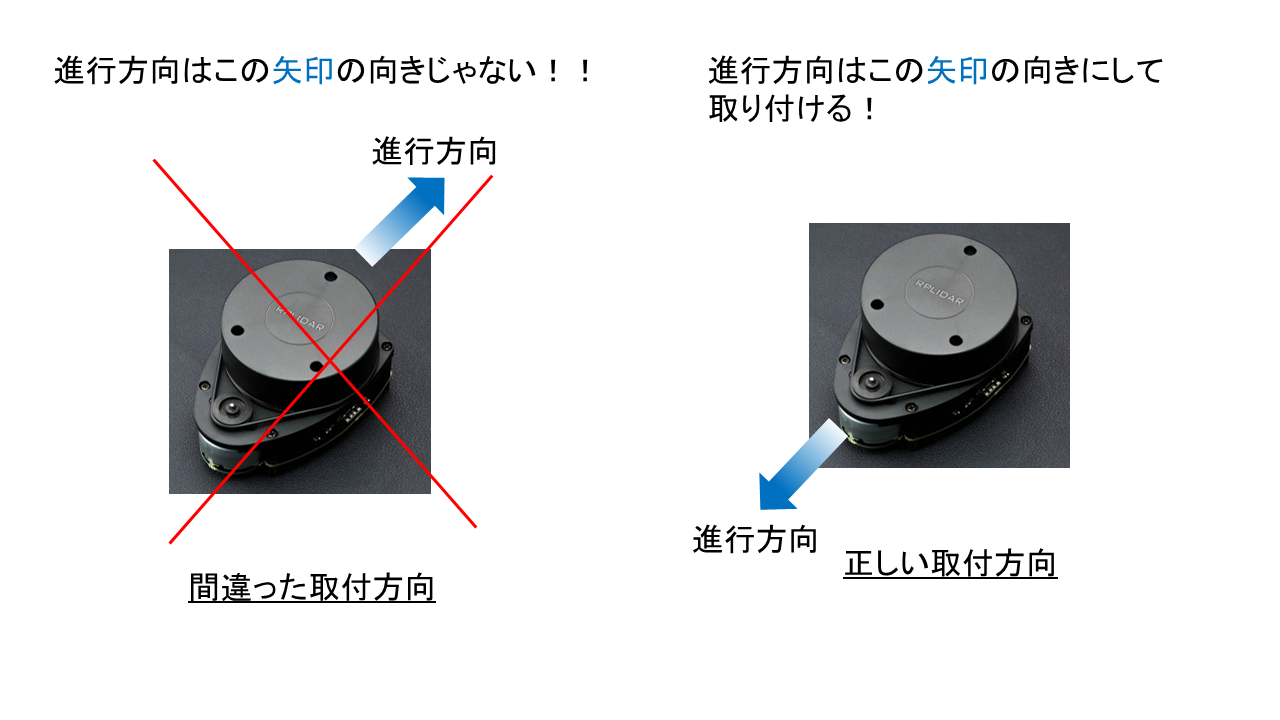
なぜこの向きが正しいかと言うと、こちらにも書いてある通り、X方向が進行方向となます。
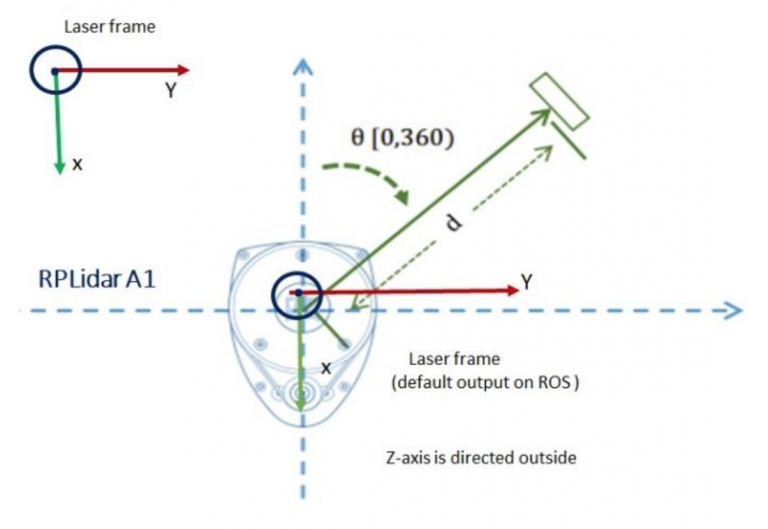
SLAMTECより参照
これを逆方向にして取り付けると、自動航行を行う際にドハマりする場合があります。
もう一度言います。
$\huge{自動航行を行う際にドハマりする(泣;;)}$場合があります。
もちろん、逆に取り付けてしまった場合でも対処方法(static_transform_publisherでパラメータを変える方法)はありますので、ご安心下さい。SLAMについては今後の章で書かせてもらいますので、お楽しみに。
次は4章.urdfを作成する
次回はurdfを作成してみます。自分で作ったロボットが、rviz上で表示されモチベーションが一気に上がってきます!こうご期待!
4章.urdfを作成する
今までの道のり
作って分かった「ROSを使う前のロボットと、ROSを使った後のロボットの変化」
目次: ROSを使った自動航行ロボットをつくるまでの道のり ー序章 概要ー
1章.ロボットのROS対応
前章 :2章.ロボットを操作する