概要
車両の定常円旋回時のヨーレイト $\gamma$および重心点スリップアングル $\beta$が,車両速度 $V$に対しどう変化するかを
MATLAB入れ子関数で書いた。
やったこと
ヨーレイト $\gamma$ ,重心点スリップアングル $\beta$ は以下式で算出できる。
\gamma = \frac{1}{1-\frac{m}{2l^2}\frac{l_fK_f-l_rK_r}{K_fK_r}V^2}\frac{V}{l}\delta_0\\
\beta = \frac{1-\frac{m}{2l}\frac{l_f}{l_rK_r}V^2}{1-\frac{m}{2l^2}\frac{l_fK_f-l_rK_r}{K_fK_r}V^2}\frac{l_r}{l}\delta_0
| 車両質量 | $m$ |
| ホイールベース | $l$ |
| 前軸-重心点距離 | $l_f$ |
| 後軸-重心点距離 | $l_r$ |
| Fr コーナリングパワー | $K_f$ |
| Rr コーナリングパワー | $K_r$ |
| 実舵角 | $\delta_0$ |
実舵角 $\delta_0$ は3deg固定とした。
入れ子関数でヨーレイト算出式を書く
function f = calc_gamma(mf,mr,l,Kf,Kr)
f = @gamma;
function y = gamma(V)
m = mf+mr;
lf = l/m*mr;
lr = l/m*mf;
SF = -m/(2*l^2)*(lf*Kf-lr*Kr)/(Kf*Kr);
delta = 3/180*pi;
v = V/3.6;
y = 1/(1+SF*v^2)*v/l*delta;
y = y/pi*180;
end
end
入れ子関数で重心点スリップアングル算出式を書く
function f = calc_beta(mf,mr,l,Kf,Kr)
f = @beta;
function y = beta(V)
m = mf+mr;
lf = l/m*mr;
lr = l/m*mf;
SF = -m/(2*l^2)*(lf*Kf-lr*Kr)/(Kf*Kr);
delta = 3/180*pi;
v = V/3.6;
y = (1-m/(2*l)*lf/(lr*Kr)*v^2)/(1+SF*v^2)*lr/l*delta;
y = y/pi*180;
end
end
入力
carAとcarBの諸元は以下とする。
この諸元でヨーレイトの関数,重心点スリップアングルの関数を定義した。
| carA | carB | |||
|---|---|---|---|---|
| Fr mass | $m_f$ | kg | 900 | 950 |
| Rr mass | $m_r$ | kg | 600 | 550 |
| Total mass | $m$ | kg | 1500 | 1500 |
| Wheelbase | $l$ | mm | 2500 | 2500 |
| Fr tire CP | $K_f$ | deg/s | 1000 | 1000 |
| Rr tire CP | $K_r$ | deg/s | 1000 | 1000 |
%% carA
mf = 900;
mr = 600;
l = 2500/1000;
Kf = 1000*180/pi;
Kr = 1000*180/pi;
g_carA = calc_gamma(mf,mr,l,Kf,Kr);
b_carA = calc_beta(mf,mr,l,Kf,Kr);
%% carB
mf = 950;
mr = 550;
l = 2500/1000;
Kf = 1000*180/pi;
Kr = 1000*180/pi;
g_carB = calc_gamma(mf,mr,l,Kf,Kr);
b_carB = calc_beta(mf,mr,l,Kf,Kr);
結果
0~160kphまでをグラフ化した。
%% グラフ描画
range = [0 160];
figure(1)
hold on
fplot(g_carA,range,'b')
fplot(g_carB,range,'r')
hold off
legend('carA','carB')
xlabel('車速 [kph]')
ylabel('ヨーレイトγ [deg/s]')
figure(2)
hold on
fplot(b_carA,range,'b')
fplot(b_carB,range,'r')
hold off
legend('carA','carB')
xlabel('車速 [kph]')
ylabel('重心点スリップアングルβ [deg]')
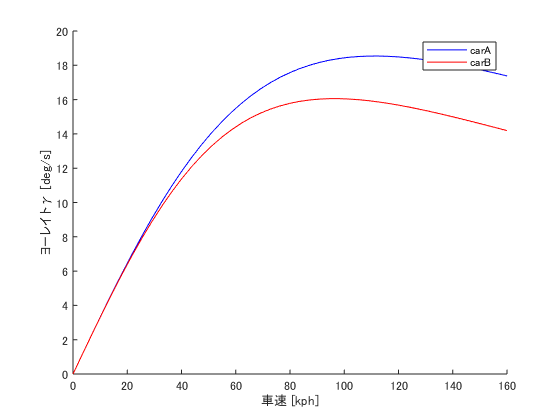
carAはcarBに比べて,低速はクイックだが,高速の穏やかさが劣ると言えそう。
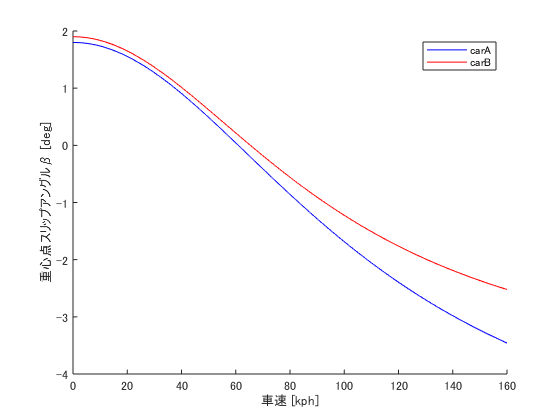
carAはcarBに比べて,低速の内向き感は良い(=外向き角小さい)が,高速は内向き感が急(=内向き角の増加が急)と言えそう。
参考
安部正人,自動車の運動と制御,東京電機大学出版局,第3章
Mathworks > ヘルプセンター > 入れ子関数
https://jp.mathworks.com/help/matlab/matlab_prog/nested-functions.html