ニュートラル付近のスティック操作はステアリングの変化量を小さくしたい
~/projects/donkeycar/donkeycar/parts/controller.py
JoystickController クラス
_init__(self,...の引数リストに
exponent = 1,
を追加
_init__(self,...の本体に
self.exponent = exponent
を追加
def set_steering(self, axis_val): に
if self.exponent > 1:
if axis_val < 0:
axis_val = (pow(self.exponent,abs(axis_val))-1) / (pow(self.exponent,1)-1) * -1
else:
axis_val = (pow(self.exponent,axis_val)-1) / (pow(self.exponent,1)-1)
を追加
def get_js_controller(cfg):の
ctr = cont_classの引数リストに
exponent=cfg.EXPONENT,
を追加
~/mycar/myconfig.py
EXPONENT = 100
を追加
EXPONENT の値が1以下の時はエキスポネンシャル無し
y = x
設定する数値が大きいほどスティックの角度に対するステアリング値の0付近のカーブが緩やかになる
y = EXPONENT の x乗
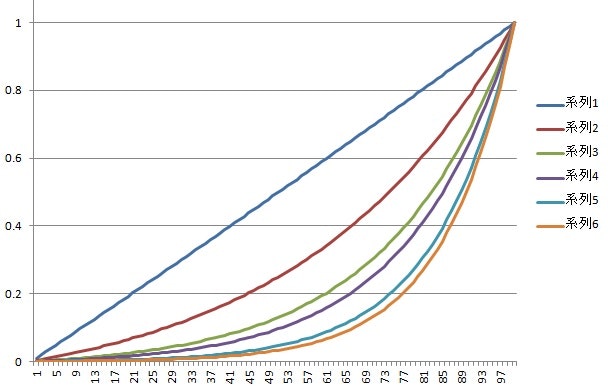
系列1:EXPONENT=1.1
系列2:EXPONENT=10
系列3:EXPONENT=50
系列4:EXPONENT=100
系列5:EXPONENT=500
系列6:EXPONENT=1000