SfMLearner++: Learning Monocular Depth & Ego-Motion using Meaningful Geometric Constraints

従来研究だとPhotometric Lossを計算する時に、Pose Estaimationが間違っていたら、Depth Estimation正しくても、Lossが大きくなってしまうという課題があった。
そこでその課題を解決するのがこの論文!
新規性
epipolar Costraing weighted Loss
 単純のPhotometric Lossにepipolar lineの類似度の重みを付ける Pose Estimationが正しい=>Epipolar Lineは同じそうする事でPose Estimationが上手くいかなかったときのPhotometric Lossを軽減できる。
p’.trans Ep = 0の証明
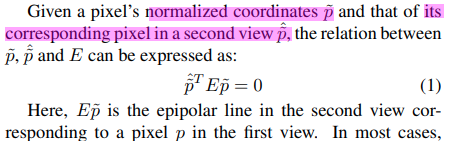 EはExtrinsic Matric(2つのカメラ館の回転と移動量)Pose Estimationが正しければこの値は0になるはず。
p'Ep = 0の証明
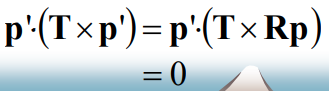 p'・(Txp')は常にゼロとなる(あとで証明する)Txp'=TxRp(pを回転させてp'と平行なベクターにすれば、Tとの外積は同じのはず)
a・(axb) =0の証明
aベクターとbベクターの外積にaベクターの内積を取ると0になる外積はaベクターとbベクターの平面に対して垂直にzを取る。
そこに内積をかければ90度なのでいつも0となる。