Fast Point R-CNN
新規性
VoxelRPN
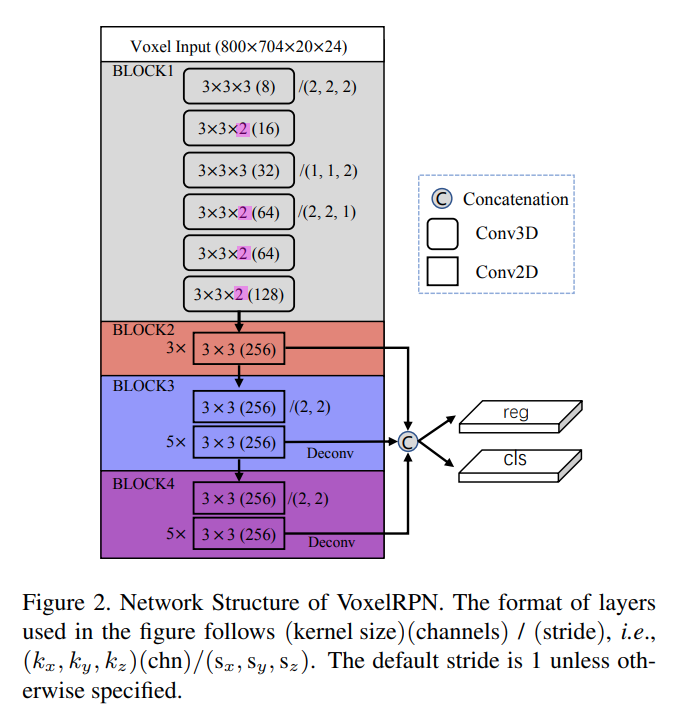
VoxelNetではVoxel化する時に1つのVoxelのPointを35個までと制限したが、6個で十分な結果が出るらしく、高速化された。
高さをChannelに畳み込むから、高さの情報を失わないようにする必要がある。そこでzのkernelサイズを2にするのがミソらしい(ちょっと詳細は理解できませんでしたm(_ _)m)。
RefinerNet
VoxelRPNのFeatureとRaw Point CloudのFeatureを結合し、PointNetに入力することで、Bounding BoxをRefineする事が出来る。
さらに図にあるように、Element-wise MultiplicationをすることでAttentionという結果に寄与しやすい特徴に重みが付けられる。