1.この記事でまとめたいこと
- 絶対変換と相対変換の違い
- MathWorks社のサンプルモデルを相対変換から絶対変換にする際に変更する箇所
- 電圧方程式とトルクの単位確認(おまけ)
手元にある埋込磁石同期モータ関連の参考書は,絶対変換しかない。海外では相対変換が主流とのうわさで、MathWorksのサンプルモデルも相対変換となっている。
2.絶対変換と相対変換の違い
2.1.まとめ
絶対変換と相対変換の各項目の違いを表で一覧化する。
本表の各項目について,次章以降で導出過程を示す。
なお、埋込磁石同期モータ、Y結線を前提とする。

2.2.電圧方程式,鎖交磁束,インダクタンス

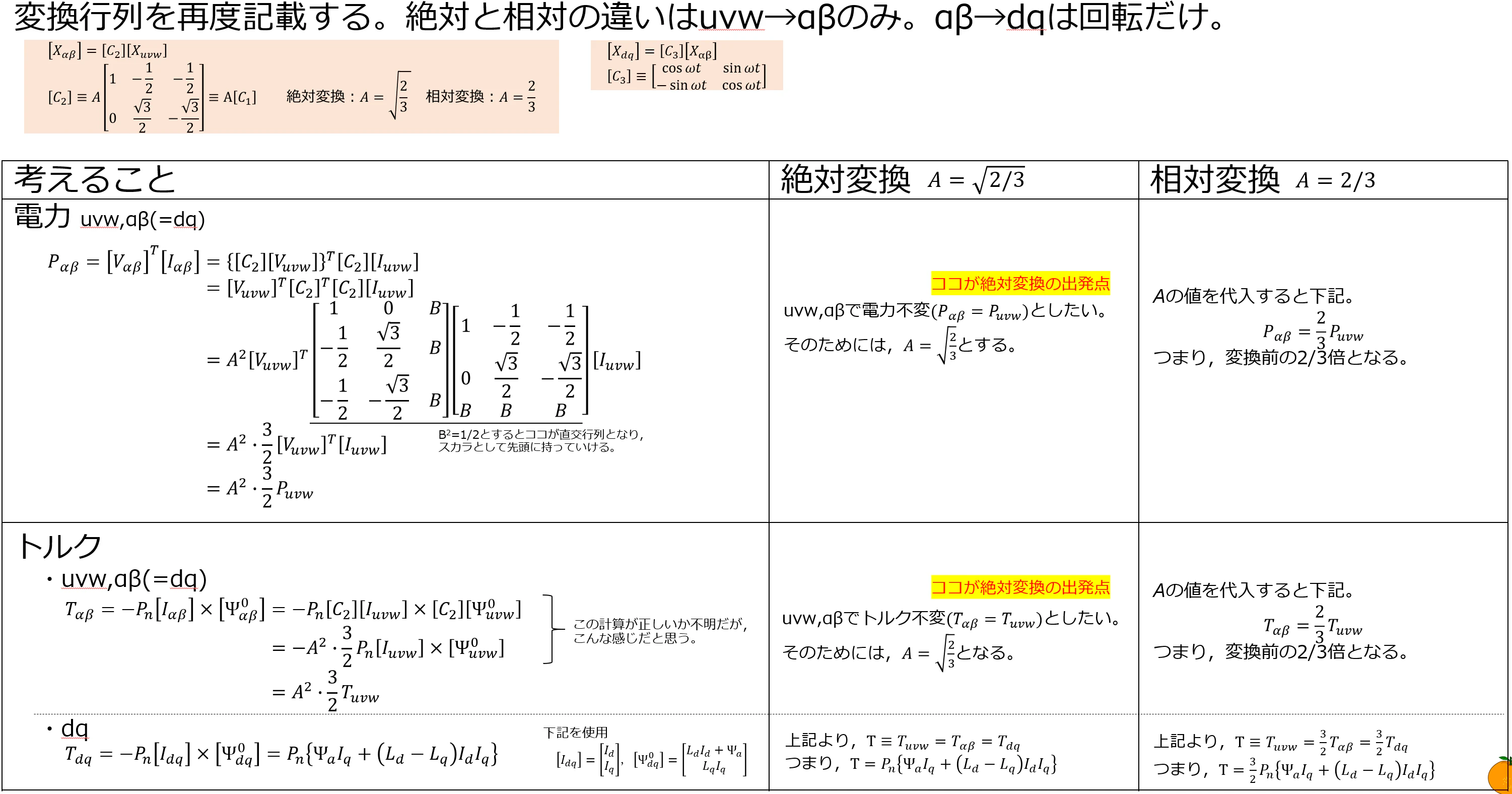
2.3.電力,トルク
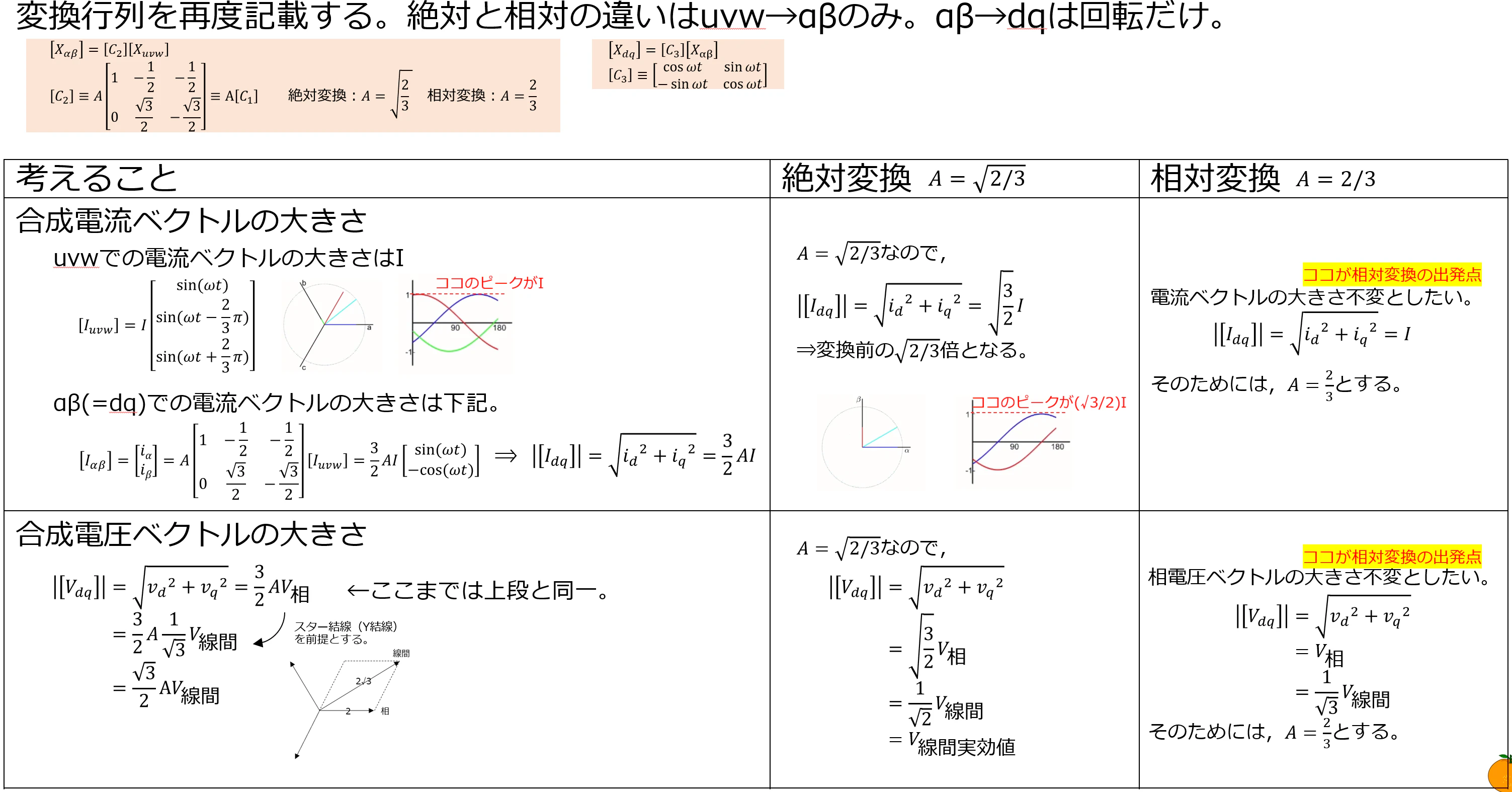
2.4.電流ベクトル,電圧ベクトル
3.MathWorksのサンプルモデルを絶対変換から相対変換にする際に変更する箇所
3.1.はじめに
・対象とするMathWorksのサンプルモデル
IPMSM トルク制御 - MATLAB & Simulink - MathWorks 日本
・上記ベースモデルに対して、下記表のように日本の参考書によくある形に変換していく。で、今後の勉強に使う。
| 変更項目 | ベース | 変更後 |
|---|---|---|
| 変換方法 | 相対変換 | 絶対変換 |
| U相をどこ基準とするか | q軸基準 | d軸基準 |
・変更箇所一覧を下記表に示す。
| No. | 変更概要 | モデルパス |
|---|---|---|
| 1 | 電流指令・トルク | Control/Outer Loop Control |
| 2 | 非干渉制御の磁石鎖交磁束 | Control/Current Control/PMSM Current Controller with Pre-Control |
| 3 | uvw⇔dq変換(変換と軸基準) | Control/Current Control/Park Transform |
| 3 | uvw⇔dq変換(変換と軸基準) | Control/Inverse Park Transform |
| 4 | モータ設定(U相をq軸基準→d軸基準 | IPMSM |
3.2.変更箇所詳細
3.2.1.電流指令・トルク
・電流指令について
電流ベクトルの絶対変換と相対変換で、相電圧ピークIは同一となる。
それぞれ、相電圧ピークで考えると、下記のようになる。
I=\sqrt{\frac{2}{3}}\cdot \sqrt{{i_{\textrm{d絶対}} }^2 +{i_{\textrm{q絶対}} }^2 }
I=\sqrt{{i_{\textrm{d相対}} }^2 +{i_{\textrm{q相対}} }^2 }
上記が等しいことから、例えばid=0とすると下記のようになる。
そのため、ベースモデルの電流マップに対してsqrt(3/2)を積算する必要がある。
i_{\textrm{q絶対}} =\sqrt{\frac{3}{2}}i_{\textrm{q相対}}
・トルク演算(係数、鎖交磁束)
相対変換で算出されているので、3/2が無駄に積算されていることになる。
その逆数2/3を積算することで、絶対変換のトルクの算出式に変更する。
uvw⇔dq変換のように、チェックボックスで選択出来ればいいのに。
鎖交磁束は2.1章から自明。
上記2点の具体的な変更箇所を下図に示す。

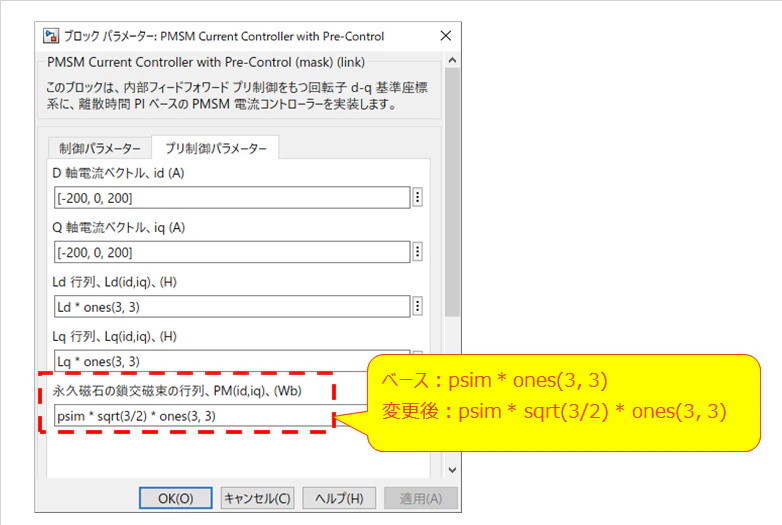
3.2.2.非干渉制御の磁石鎖交磁束
具体的な変更箇所を下図に示す。
3.2.3.uvw⇔dq変換(変換と軸基準)
具体的な変更箇所を下図に示す。

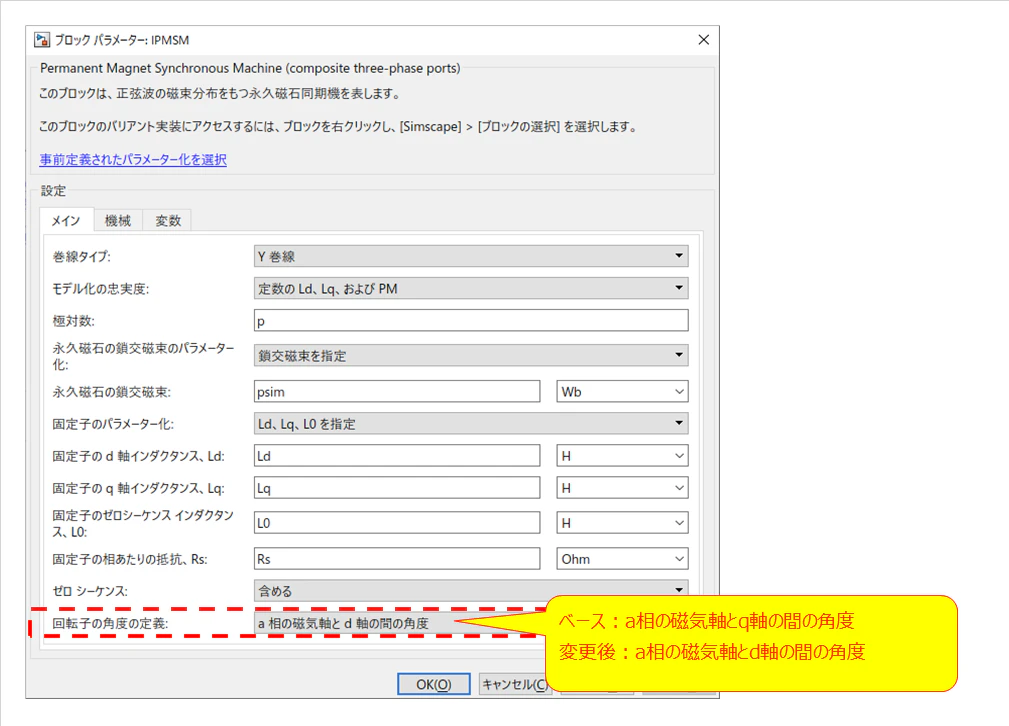
3.2.4.モータ設定(U相をq軸基準→d軸基準)
具体的な変更箇所を下図に示す。
4.電圧方程式とトルクの単位確認(おまけ)
電圧方程式とトルクの式について,左辺と右辺の単位が一致しているか,ざっくり確認をしたくなったのでまとめる。

5.参考サイト
清水 悠生さんのサイト。電圧方程式等、行間無しイメージ有りでとても分かりやすい。
これをメインで読んで理解し,本記事を作成した。
モータ技術 | モータ研究者の技術解説 (yuyumoyuyu.com)
長岡モータディベロップメント株式会社のサイト。
絶対変換と相対変換の結論について記載されている。なんでこうなるの?と思い,勉強して本記事を作成した。
PMモータのベクトル制御基礎 – 長岡モーターディベロップメント株式会社 (nagaoka-md.co.jp)
MathWorksのサイト
二相三相変換の動画イメージがとてもわかりやすい。
Clarke-Park 変換 - MATLAB & Simulink (mathworks.com)
MathWorksのサンプルモデル。
相対変換で構築されている。これを絶対変換に変更した。
IPMSM トルク制御 - MATLAB & Simulink - MathWorks 日本