はじめに
YOLOは C言語で作られた機械学習のフレームワークdarknet上で動く、物体検出のネットワークです。今回はYOLO v3をDocker上で動かしてみました。やったことは次の通りです。
- darknetをCPU用にビルド
- yolov3のモデルと、yolov3-tinyのモデルの両方を試す
- Python2用のサンプルを拡張し、Python3から使えるようにする(GitHub)
- ついでに枠とラベルを書き込むようにする
実験にあたっては、こちらの記事を参考にさせていただきました。
環境
- ホストOS: Mac OS X 10.12.6 (Sierra)
- Docker: Docker for Mac Version 17.06.0-ce-mac18 (18433)
- コンテナのベース: Ubuntu 18.04 LTS
Dockerfile
次のモジュールやファイルをインストールしています。
- python3
- ツール群(git, vim, wget)
- darknet
- yolo v3モデル, yolo v3 tinyモデル
- python3用のサンプル
# Ubuntu 18.04 and yolo v3
# darknet: https://github.com/pjreddie/darknet
FROM ubuntu:18.04
MAINTAINER mganeko
#
# -- if you are using docker behind proxy, please set ENV --
#
# ENV http_proxy "http://proxy.yourdomain.com:8080/"
# ENV https_proxy "http://proxy.yourdomain.com:8080/"
ENV DEBIAN_FRONTEND nonineractive
# -- build step --
RUN apt update && apt upgrade -y
RUN apt install python3 -y
RUN apt install python3-pip -y
RUN apt install python3-dev -y
RUN python3 -V
RUN pip3 -V
RUN pip3 install --upgrade pip
RUN pip -V
RUN apt install git -y
RUN apt install vim -y
RUN apt install wget -y
#
# ------ yolo v3 ---
#
RUN mkdir /root/work
WORKDIR /root/work/
RUN git clone https://github.com/pjreddie/darknet.git
WORKDIR /root/work/darknet
RUN make
RUN wget https://pjreddie.com/media/files/yolov3.weights
RUN wget https://pjreddie.com/media/files/yolov3-tiny.weights
RUN ln -s /root/work/darknet/libdarknet.so /usr/lib/libdarknet.so
# -- copy ---
WORKDIR /root/work/
RUN git clone https://github.com/mganeko/python3_yolov3.git
RUN cp /root/work/python3_yolov3/darknet-tiny-label.py /root/work/darknet/python/
# --- for running --
WORKDIR /root/work/darknet/
ビルド手順
ターミナルから docker build を実行(イメージ名は適宜付けてください)
$ docker build -t mganeko/yolov3 -f Dockerfile .
起動手順
(1) ホスト側で作業ディレクトリを用意
$ mkdir temp
(2) 作業ディレクトリをマウントして、ターミナルから docker run でコンテナを起動
$ docker run -it -v `pwd`/temp:/root/work/temp mganeko/yolov3 bash
実行結果
コンテナ内のbashで実行します。
darknet (C言語サンプル)
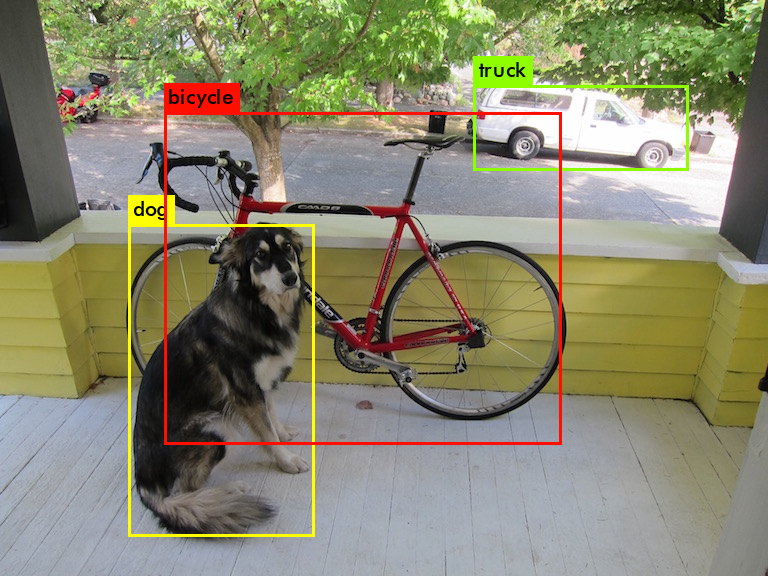
yolo v3 通常モデル
$ ./darknet detect cfg/yolov3.cfg yolov3.weights data/dog.jpg
$ cp predictions.png ../temp
10秒程度かかりました。
data/dog.jpg: Predicted in 10.687456 seconds.
dog: 99%
truck: 92%
bicycle: 99%
yolo v3 tiny モデル
$ ./darknet detect cfg/yolov3-tiny.cfg yolov3-tiny.weights data/dog.jpg
こちらは1秒弱です。だいぶ確信度が下がりましたが、速いです。
data/dog.jpg: Predicted in 0.968052 seconds.
dog: 57%
truck: 56%
car: 62%
bicycle: 59%
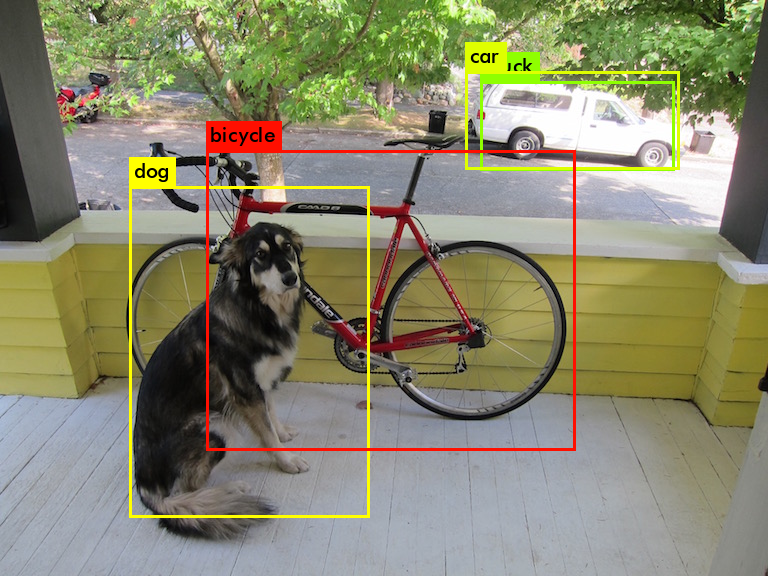
トラックと自動車で2重に検出されています。
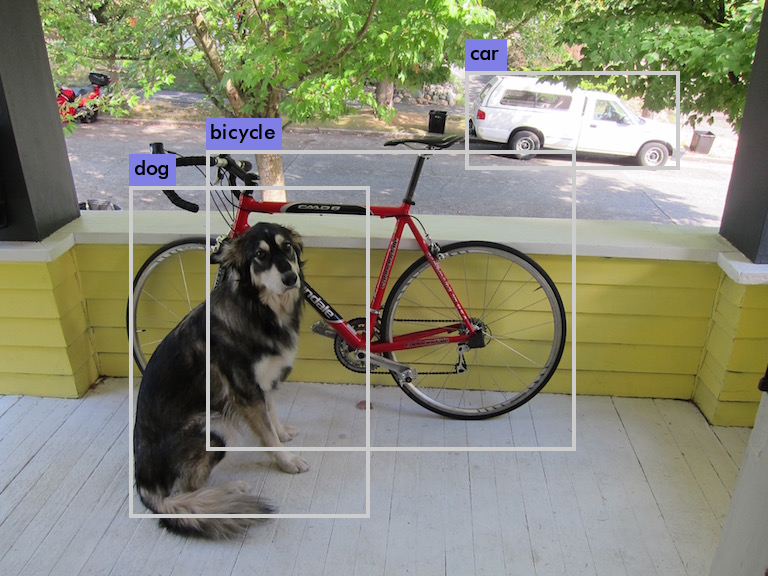
Python3 サンプル
darknetに付属のサンプルはPython2用の物だったので、次のように改造しました。(GitHub)
- Python 3 用に変更
- yolov3-tinyモデルを使う
- 検出枠とラベルを合成した画像を出力(ファイル名は detect_result.png で固定)
コンテナ内のbashで次のように実行します。結果のファイルを、ホストからマウントしたディレクトリにコピーしています。
$ python3 python/darknet-tiny-label.py
$ cp detect_result.png ../temp
実行結果はこちらです。同じく1秒程度かかります。
Python3での実装
Python3 で検出枠とラベルを合成するために、いくつかの処理を加えました。
Cのヘッダーファイルを参考に、使いたい関数の引数の型を定義します。
# --- add for save image, frame and label --
save_image = lib.save_image
save_image.argtypes = [IMAGE, c_char_p]
draw_box_width = lib.draw_box_width
draw_box_width.argtypes = [IMAGE, c_int, c_int, c_int, c_int, c_int, c_float, c_float, c_float]
load_alphabet = lib.load_alphabet
load_alphabet.restype = POINTER(POINTER(IMAGE))
get_label = lib.get_label
get_label.restype = IMAGE
get_label.argtypes = [POINTER(POINTER(IMAGE)), c_char_p, c_int]
draw_label = lib.draw_label
draw_label.argtypes = [IMAGE, c_int, c_int, IMAGE, POINTER(c_float)]
枠はdraw_box_width()で描画します。取得された領域の座標が、左上でなくて中心点の座標であることに、最初は気が付きませんでした。
b = dets[j].bbox
# -- rect -- (image, left, top, right, bottom, line_width, R, G, B)
draw_box_width(im, int(b.x - b.w/2), int(b.y - b.h/2), int(b.x + b.w/2), int(b.y + b.h/2), int(4), 0.8, 0.8, 0.8)
ラベルの描画は2段階です。さらにその前にフォント情報(?)らしきものを読み込んでおく必要があります。
alp = load_alphabet()
#-- label --
name = meta.names[i]
label = get_label(alp, name, 18) # ラベルをイメージとして取得
draw_label(im, int(b.y - b.h/2), int(b.x - b.w/2), label, farray); #ラベルを描画
free_image(label)
終わりに
darknet / YOLO v3 を動かすところまでは割とすんなり行ったのですが、Pythonから呼び出して、枠とラベルを合成するところに苦労しました。なんとかやり方は分かったので、他の応用ができそうです。
また、CPUではどうしても時間がかかるので、GPU環境でも試してみたいところです。