はじめに
-
arXiv上の以下の論文(CenterNet)のまとめ
[1] X. Zhou, et. al. "Objects as Points" -
まとめ記事
DeNAのざっくりしたまとめ:
https://engineer.dena.jp/2019/07/cv-papers-19-keypoint-object-detection.html -
著者らのコード
Github:
https://github.com/xingyizhou/CenterNet
Pytorchっぽい。
journal等投稿先は不明。
概要
- 2D、3Dのobject detectionやpose estimationで使えるしくみ
- 物体の中央点をヒートマップで推定し、その関連情報も同時に推定する
- そこそこの精度を保ちながらリアルタイムなスピードで処理できる
以下が手法をわかりやすくまとめた絵。
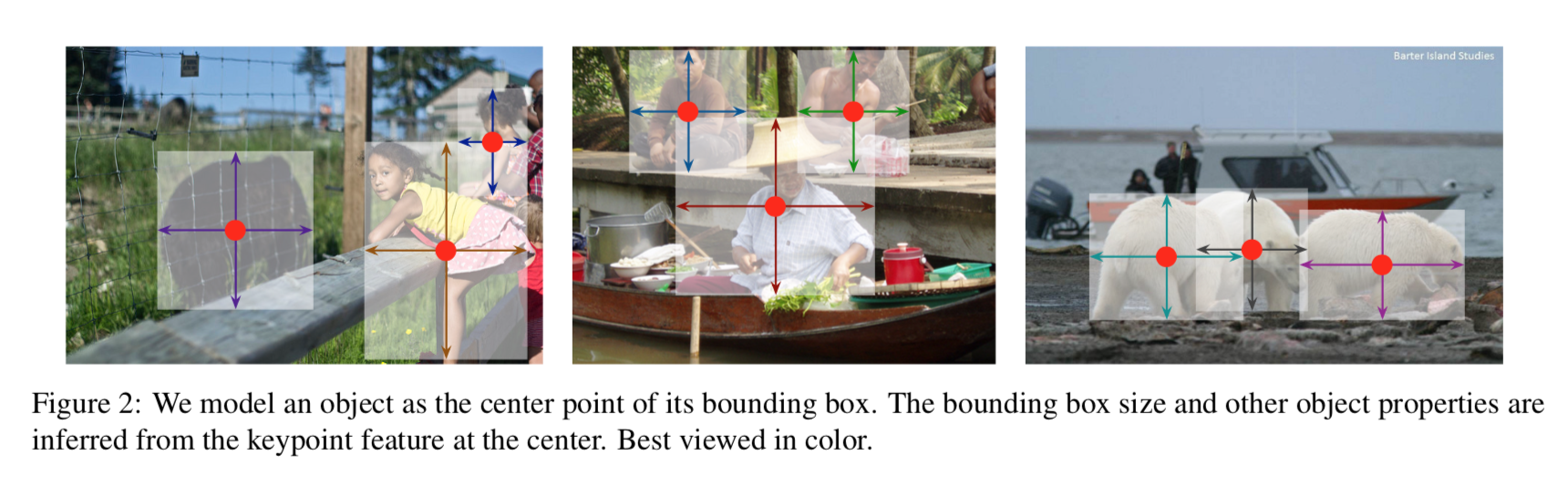 ([1] Figure2より)
([1] Figure2より)
物体の中心位置を赤い点のように推定する。出力のうち、矩形の縦チャンネル、横チャンネルからこの中心位置にあたるものを抜いてくればよい。
以下は推論速度と精度との関係図。
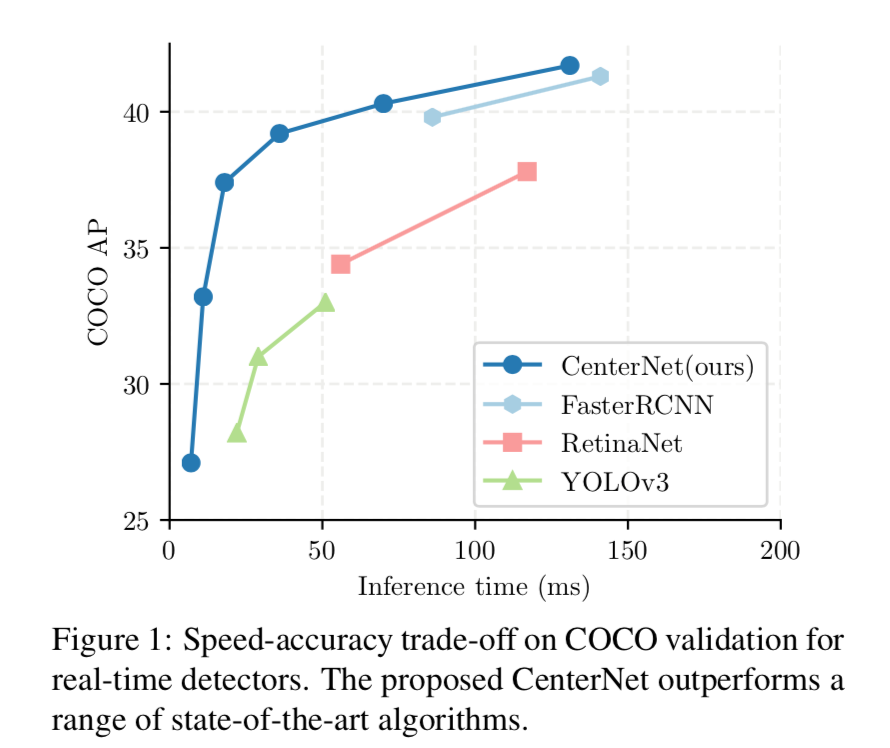
([1]Figure1より)
YOLOやRetinaNetよりも更に左上に寄っている。
手法の解説
1. ヒートマップの作成
- $I \in R^{W \times H \times 3}$ ・・・入力画像
- $\hat{Y} \in [0,1]^{\frac{W}{R} \times \frac{H}{R} \times C}$ ・・・推定したheatmap。$R$ は縮小率。$C$ はheatmapの数。
骨格推定などと同様、ターゲットのheatmapはガウシアンカーネルで山形にする。
Y_{xyc} = \exp \left( - \frac{(x-\tilde{p}_x)^2 + (y-\tilde{p}_y)^2}{2 \sigma^2_p} \right)
$\tilde{p} = (\tilde{p}_x, \tilde{p}_y)$ は出力画像の大きさにおける物体中心点の座標。
$\sigma_p$ は物体ごとの標準偏差。これも骨格推定と同様だが、2つ以上のpeakによる重なりは最大値を採用する。
2. heatmapに関するLoss
heatmap に対するLoss は focal-loss。
L_k = \frac{-1}{N} \sum_{xyc}
\begin{cases}
(1-\hat{Y}_{xyc})^{\alpha} \log (\hat{Y}_{xyc}) & if \ Y_{xyc} = 1 \\
(1-\hat{Y}_{xyc})^{\beta} (\hat{Y}_{xyc})^{\alpha} \log (1-\hat{Y}_{xyc}) & otherwise \\
\end{cases}
$N$ は画像中のkeypointの数。
3. オフセットに関するloss
出力画像は大きさが $\frac{W}{R} \times \frac{H}{R}$ と粗くなってるので、heatmapのpeakを拾っても元の画像上の位置から微妙にずれてる可能性がある。そこでオフセット $\hat{O} \in \mathcal{R}^{\frac{W}{R} \times \frac{H}{R} \times 2}$ も推定させ、target のオフセットとの L1 で loss をとり、学習させる。
L_{off} = \frac{1}{N} \sum_p \left|\hat{O}_p - \left( \frac{p}{R} - \tilde{p} \right) \right|
4. bounding box の幅、高さに関する loss
各 $k$ チャンネルにおける bounding box は1つ推定する。その幅、高さを $w_k, h_k$ とすると、bounding box のサイズは $s_k = (w^{(k)}, h^{(k)})$ となる。
これの推論値 $\hat{S}_{p_k} \in \mathcal{R}^{\frac{W}{R} \times \frac{H}{R} \times 2}$ とで L1 をとり、lossとする。
L_{size} = \frac{1}{N} \sum^{N}_{k=1} \left| \hat{S}_{p_k} - s_k \right|
5. トータルの loss
トータルの loss: $L_{det}$ は以下。
L_{det} = L_k + \lambda_{size} L_{size} + \lambda_{off} L_{off}
ハイパーパラメータの $\lambda$ は $\lambda_{size} = 0.1$ と $\lambda_{size} = 1.$ を用いている。
6. 推論時のbounding box 推定手順
(1)各 $c$ チャンンルの heatmap におけて周辺8近傍のpeakを値が高いものから順に100個
\hat{P}_c = \left\{ (\hat{x}_{c,i}, \hat{y}_{c,i}) \right\}^{100}_{i=1}
拾う。
(2)中心はオフセットも考慮して $(\hat{x}_{c,i} + \delta \hat{x}_{c,i}, \hat{y}_{c,i} + \delta \hat{y}_{c,i})$ とする。
(3)矩形の座標は推定した $(\hat{w}_{c,i}, \hat{h}_{c,i})$ から
左上の座標は、
(\hat{x}_{c,i} + \delta \hat{x}_{c,i} - \frac{\hat{w}_{c,i}}{2}, \hat{y}_{c,i} + \delta \hat{y}_{c,i} - \frac{\hat{h}_{c,i}}{2})
、右下の座標は
(\hat{x}_{c,i} + \delta \hat{x}_{c,i} + \frac{\hat{w}_{c,i}}{2}, \hat{y}_{c,i} + \delta \hat{y}_{c,i} + \frac{\hat{h}_{c,i}}{2})
とする。
ニューラルネットのアーキテクチャ
4つのアーキテクチャを用いた。
- ResNet-18
- ResNet-101
- DLA-34
- Hourglass-104
3番目のDLAは知らなかったが、[2]で提案されたこのような
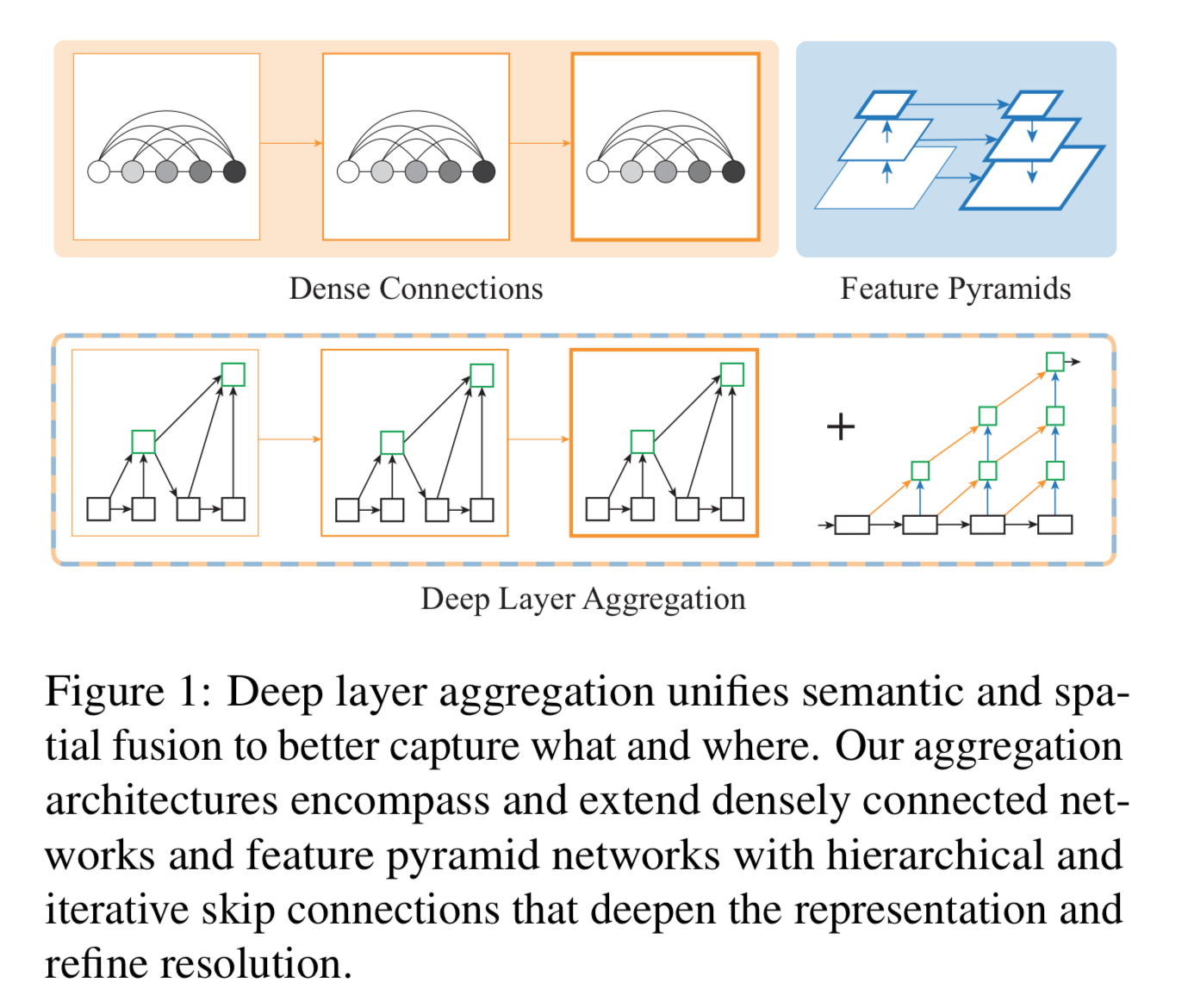 ([2]Figure1より)
ネットワーク。
([2]Figure1より)
ネットワーク。
実験と結果
1. 4つのネットワークで精度・速度を比較
MS COCO datasetで4つのアーキテクチャを比較したものが以下。
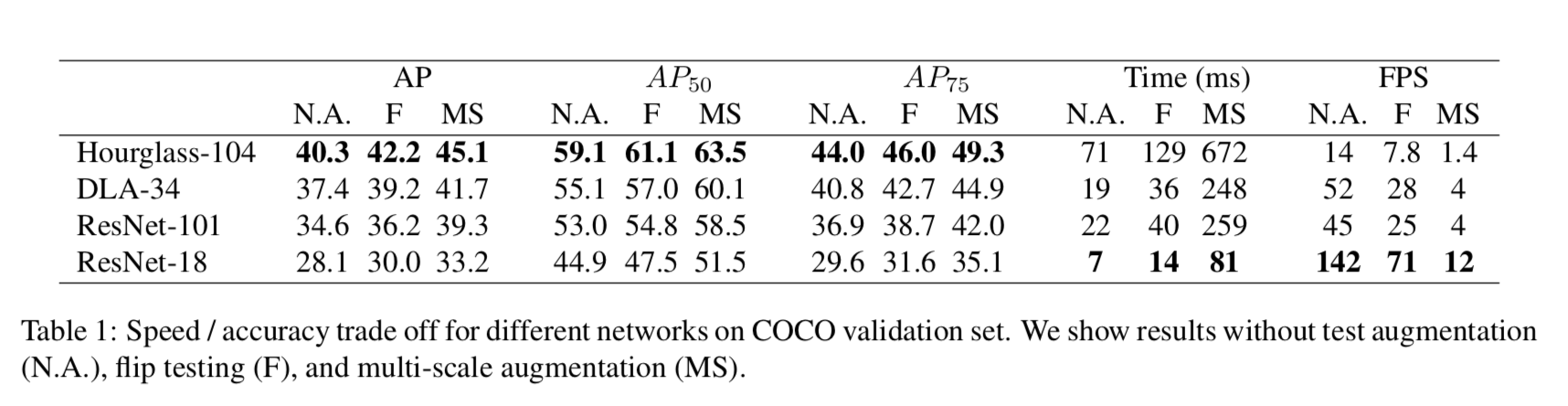
推論速度は軽いResNe-18が最速だが、精度は今流行りのHourglassがいい。
2. 他の有名モデルとの精度・速度の比較
MS COCO test dataset を用いて既存の有名モデルとの精度・速度の比較をした結果は以下。
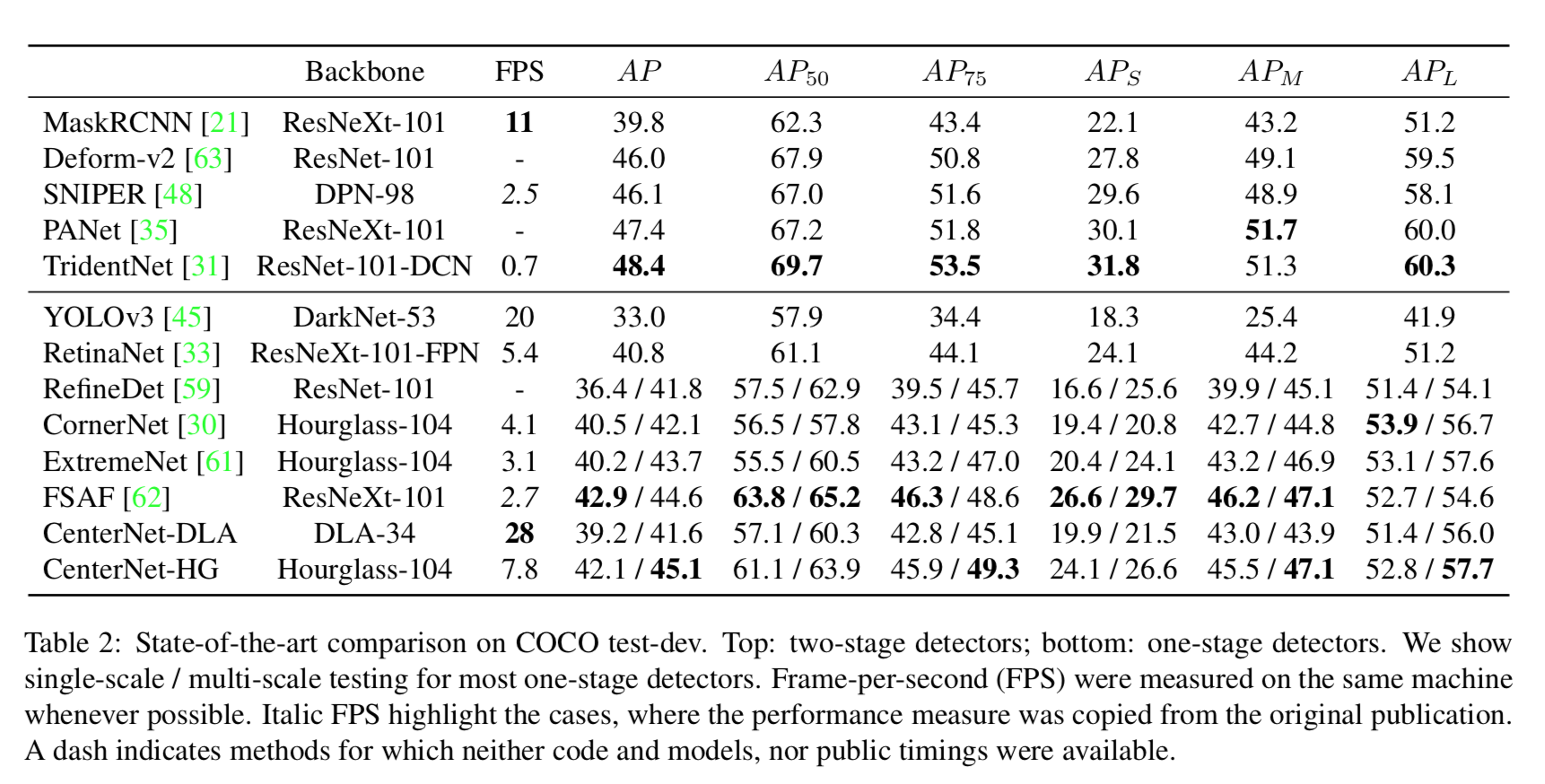
説明にも書いているが、CenterNet-DLAはDLAのアーキテクチャ、CenterNet-HGはhourglass。average precisionのスラッシュ左側がsingle scale、右がmulti scale。
FASF に比肩しうる精度でありながら3倍の推論速度となっている。
Reference
[2] F. Yu, et. al."Deep layer aggregation", CVPR 2018.