みなさんこんにちは。
某小売業でECシステムに関わっています。
こちらの記事はIoTLT Advent Calendar 2024の15日目の記事です。残念ながら、システム自体は完成していませんが、備忘録もかねて書きます。
1.店舗内ロボット構想
人手不足により、店舗運営に支障をきたす未来に向けて、私は店舗内へロボットを導入する試みを考えています。

まずは、費用が掛からないところから調査を進め、技術的に可能であることや効果の見通しがつくレベルまで実施したほうが、導入のハードルが下がると考えています。
2.今回の範囲
ロボットの制御としてRaspberryPi5を用いると想定し、店舗内の環境認識を行う。
ただし、今回は追加学習せずに既存モデルにて行う。
店舗内を推論して、ロボットの動作と結びつける例として、人を検出したら停止判断処理をするなどを想定している。ただし、モーターの制御そのものは今回対象外とする。
3.使用したツール
・Raspberry Pi 5
・動画 スーパーマーケットってどんな店? NHKからの引用
・YOLOv10
・USBカメラ

4.開発
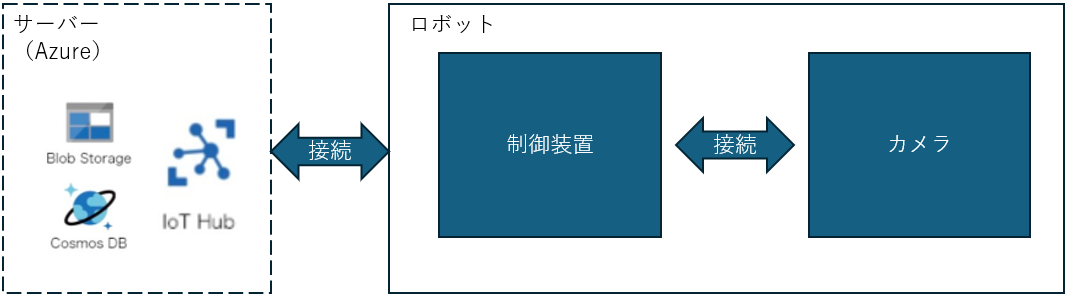
AzureのIoT Hubを使うことにより、データの連携なども可能になると考えました。点線部分は今回構築したものの、疎通にとどまっていますので、今回説明は省きます。
4-1.YOLOv10
物体検出に使用したのはYOLOv10になります。リソースが極端に制限された環境向けのナノバージョンのモデルを選びました。YOLOv10については、以下に詳しくまとめられています。
4-2.RaspberryPi5にYOLOv10を実装
以下の記事を参考にしています。
4-3.店舗動画で動作確認
実装モデルを簡易的に実験するため、別のPCで動画を流し、RaspberryPi5のカメラでとらえる手法を考えました。


4-4.所感
おおよそ認識はできていると感じましたが、リソースが極端に制限された環境向けのナノバージョンを用いたことで、精度は他のバージョンよりも下がっているかもしれません。また、RaspberryPiということもあり、リアルタイムに検知できるものの2秒程度遅れているように感じました。
店舗内ロボットに応用するなら・・・
人の認識はできているけれど、何m先なのかなどの情報も実現する上では必要だと感じました。2秒程度遅れも不安要素かなと感じています。
5.次は未完成を実施させるぞ!
今回は、YOLOv10とRaspberryPi5で店舗内を推論をしました。![]()
店舗内ロボットに応用するにはもう少し時間がかかりそうですが、できなくもないという感触です。また、途中となっているAzure IoTとの繋ぎを行い、今後も開発していきたいと思います。
最後まで読んでいただき、ありがとうございました!