ソースコード
# include <Stepper.h>
# define P1 8
# define P3 9
# define P2 10
# define P4 11
Stepper stepper = Stepper(2048, P1, P2, P3, P4);
void setup()
{
stepper.setSpeed(10);
stepper.step(2048);
stepper.step(-2048);
}
void loop()
{
}
配線
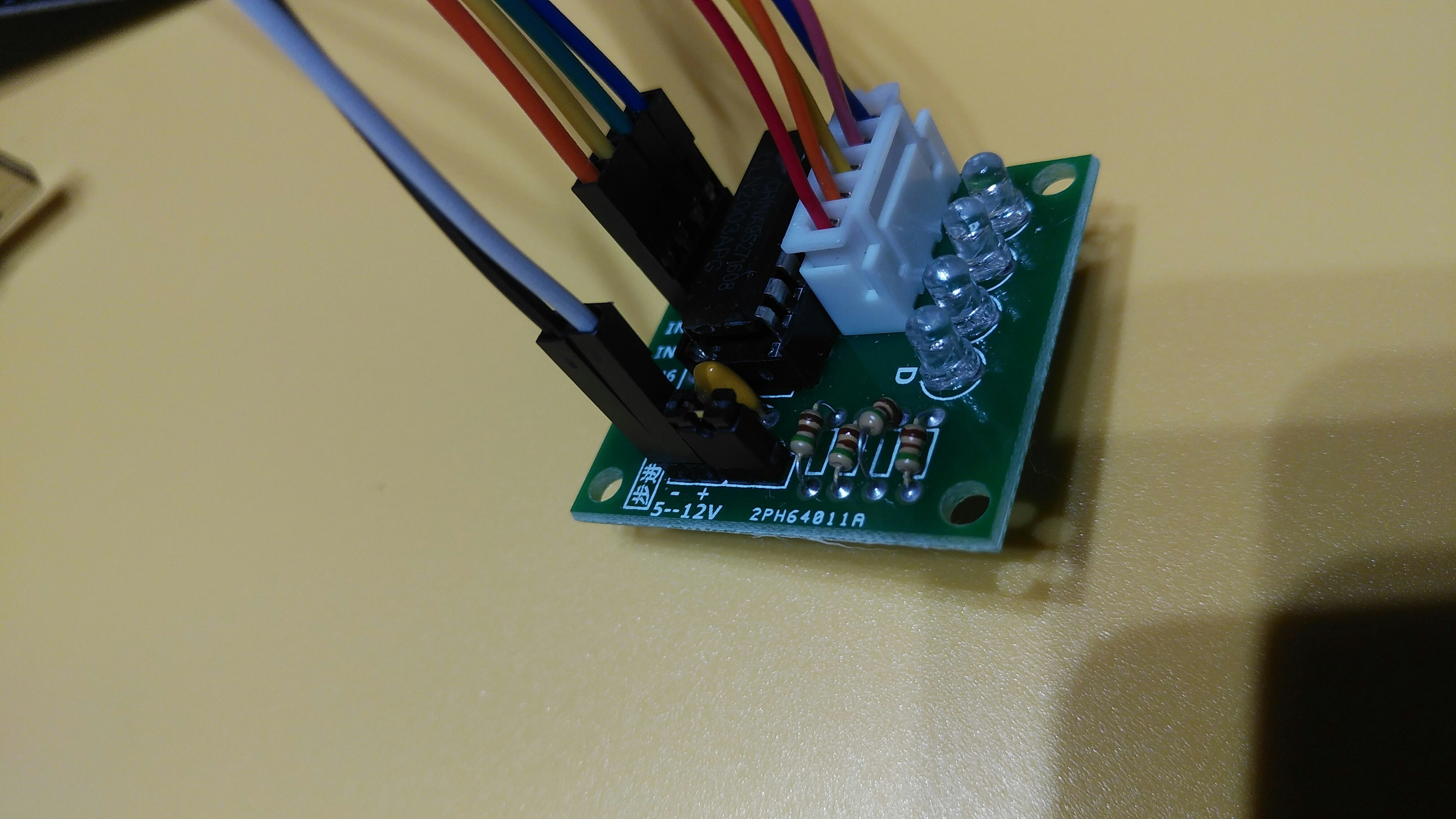
IN1~IN4を8~11へ。
後は電源とGND。一応Vinから取った。
別電源とジャンパーについて
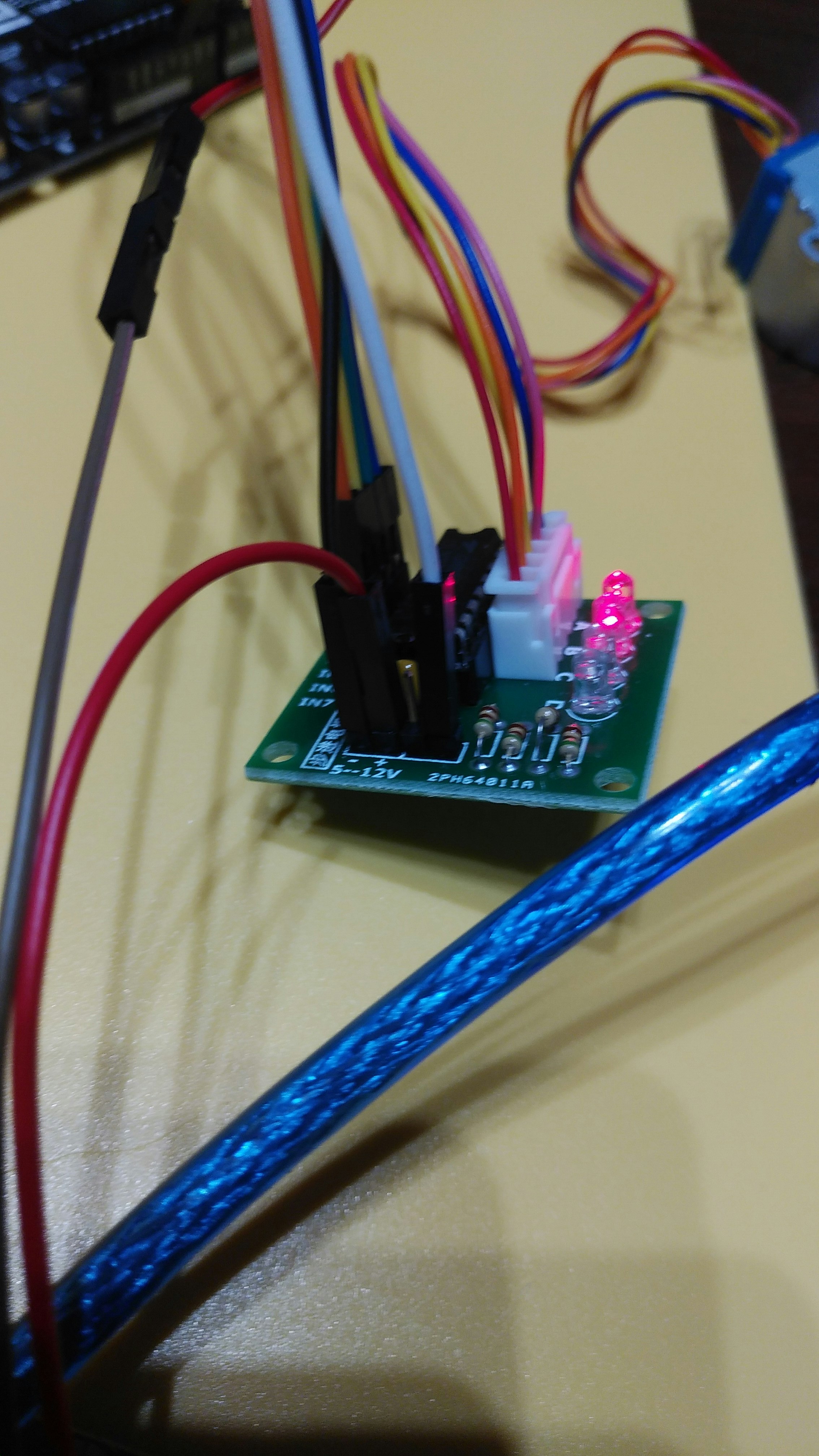
別に電源を用意する場合はジャンパーを取り外す。
モーター用は5v~12vと書いてある。
ジャンパーを取り外したら外側のピンに5vを入れる。
ArduinoのGNDと別電源のGNDはつなげておくこと。
ジャンパーは電源スイッチ的なことを書いているサイトがあるが注意。そんなはずない。