はじめに
ラズベリーパイにて、自作のラジコンカーをつくったので紹介します。
今回は、制御になります。
ラジコンカー関連の記事
- ラズパイにて、ラジコンカーを自作する-その1
- ラズパイにて、ラジコンカーを自作する-その2 ← 本記事
- ラズパイにて、ラジコンカーを自作する-その3
紹介する内容
- ラズパイ側のラジコン制御
作るものの全体
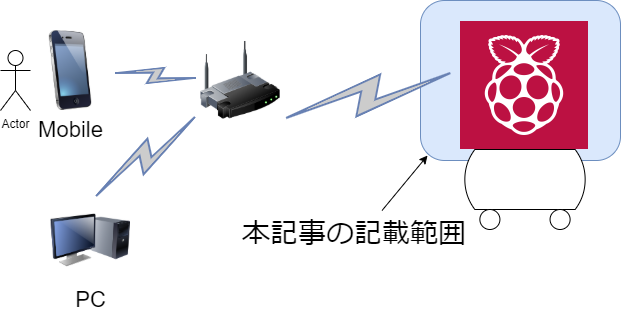
ラズパイ側のプログラムです。
作業環境
- ラズベリーパイ3
- Raspbian Buster with desktop and recommended software
- Version:February 2020
- Release date:2020-02-13
- Kernel version:4.19
- Python3.7
- Raspbian Buster with desktop and recommended software
作業手順
今回は、Pythonで実装します。
まずは、モータードライバのクラスを作ります。
モータードライバの制御
コードは、ラズパイで動くモノを作るを参考にさせていただきました。(ほぼ同じ)
コード : ta7291p.py
import RPi.GPIO as GPIO
STATE_STOP = 0
STATE_ON = 1
class Motor:
def __init__(self, pina, pinb, pwmpin):
self.state = STATE_STOP
self.pina = pina
self.pinb = pinb
self.pwmpin = pwmpin
self.duty = 0
GPIO.setmode(GPIO.BCM)
GPIO.setwarnings(False)
GPIO.setup(self.pina, GPIO.OUT)
GPIO.output(self.pina, GPIO.LOW)
GPIO.setup(self.pinb, GPIO.OUT)
GPIO.output(self.pinb, GPIO.LOW)
GPIO.setup(self.pwmpin, GPIO.OUT)
GPIO.output(self.pwmpin, GPIO.LOW)
self.pwm = GPIO.PWM(self.pwmpin, 80)
return
def setspeed(self,duty):
self.duty = duty
if self.state == STATE_ON:
self.pwm.ChangeDutyCycle(self.duty)
return self.state
def accelon(self,back = False):
if back == False:
GPIO.output(self.pina, GPIO.HIGH)
GPIO.output(self.pinb, GPIO.LOW)
else:
GPIO.output(self.pina, GPIO.LOW)
GPIO.output(self.pinb, GPIO.HIGH)
if self.state == STATE_STOP:
self.pwm.start(self.duty)
self.state = STATE_ON
return self.state
def acceloff(self):
GPIO.output(self.pina, GPIO.LOW)
GPIO.output(self.pinb, GPIO.LOW)
self.pwm.stop()
self.state = STATE_STOP
return self.state
def brakeon(self):
GPIO.output(self.pina, GPIO.HIGH)
GPIO.output(self.pinb, GPIO.HIGH)
self.pwm.stop()
GPIO.output(self.pina, GPIO.LOW)
GPIO.output(self.pinb, GPIO.LOW)
self.state = STATE_STOP
return self.state
"GPIO.setwarnings(False)"は、WARNINGを非表示
ラジコンカーの制御
ラジコンカー部分の制御は以下となります。
コード : picar.py
from ta7291p import Motor
import time
FRONT_LEFT_WHEEL_PIN_A = 17
FRONT_LEFT_WHEEL_PIN_B = 4
FRONT_LEFT_WHEEL_PWMPIN = 27
FRONT_RIGHT_WHEEL_PIN_A = 18
FRONT_RIGHT_WHEEL_PIN_B = 23
FRONT_RIGHT_WHEEL_PWMPIN = 24
REAR_LEFT_WHEEL_PIN_A = 6
REAR_LEFT_WHEEL_PIN_B = 13
REAR_LEFT_WHEEL_PWMPIN = 19
REAR_RIGHT_WHEEL_PIN_A = 20
REAR_RIGHT_WHEEL_PIN_B = 12
REAR_RIGHT_WHEEL_PWMPIN = 21
class PiCar():
def __init__(self):
self._motors = {}
self._motors["front_left"] = Motor(FRONT_LEFT_WHEEL_PIN_A, FRONT_LEFT_WHEEL_PIN_B, FRONT_LEFT_WHEEL_PWMPIN)
self._motors["front_right"] = Motor(FRONT_RIGHT_WHEEL_PIN_A, FRONT_RIGHT_WHEEL_PIN_B, FRONT_RIGHT_WHEEL_PWMPIN)
self._motors["rear_left"] = Motor(REAR_LEFT_WHEEL_PIN_A, REAR_LEFT_WHEEL_PIN_B, REAR_LEFT_WHEEL_PWMPIN)
self._motors["rear_right"] = Motor(REAR_RIGHT_WHEEL_PIN_A, REAR_RIGHT_WHEEL_PIN_B, REAR_RIGHT_WHEEL_PWMPIN)
self._speed = 0
self.state = 0
self.set_speed(100)
return
def set_speed(self, speed):
self._speed = speed
for key in self._motors:
self._motors[key].setspeed(speed)
return
def turn_left(self):
print("turn_left : run")
for key in self._motors:
if "rear" in key:
self._motors[key].setspeed(int(self._speed * 0.7))
else:
self._motors[key].setspeed(self._speed)
if "left" in key:
self._motors[key].accelon(back=True)
if "right" in key:
self._motors[key].accelon()
print("turn_left : over")
return
def turn_right(self):
print("turn_right : run")
for key in self._motors:
if "rear" in key:
self._motors[key].setspeed(int(self._speed * 0.7))
else:
self._motors[key].setspeed(self._speed)
if "left" in key:
self._motors[key].accelon()
if "right" in key:
self._motors[key].accelon(back=True)
print("turn_right : over")
return
def forward(self):
print("forward : run")
for key in self._motors:
self._motors[key].setspeed(self._speed)
self._motors[key].accelon()
print("forward : over")
return
def back(self):
print("back : run")
for key in self._motors:
self._motors[key].setspeed(self._speed)
self._motors[key].accelon(back=True)
print("back : over")
return
def brake(self):
print("brake : run")
for key in self._motors:
self._motors[key].brakeon()
print("brake : over")
return
def acceloff(self):
print("acceloff : run")
for key in self._motors:
self._motors[key].acceloff()
print("acceloff : over")
return
def debug_proc(self):
time.sleep(5)
# Check for each tire
# for key in self._motors:
# print(key)
# time.sleep(1)
# self._motors[key].setspeed(100)
# self._motors[key].accelon()
# time.sleep(1)
# self._motors[key].accelon(back=True)
# time.sleep(1)
# self._motors[key].acceloff()
# Check : operation function
self.forward()
time.sleep(1)
self.brake()
time.sleep(1)
self.turn_left()
time.sleep(1)
self.turn_right()
time.sleep(1)
self.acceloff()
time.sleep(1)
self.back()
time.sleep(1)
self.acceloff()
if __name__ == '__main__':
pi_car = PiCar()
pi_car.debug_proc()
下記のコマンドを実行で、動作確認をします。
$ python picar.py
正しく動作すれば、
前進→ブレーキ→左旋回→右旋回→停止→バック→停止
の順に動作します。
さいごに
次の記事が最後の予定です。
ネットワーク越しに制御したいと思います。