こんにちは、今回はPythonを使用してIAI RCONコントローラをModbus RTUで制御する方法について解説します。具体的には、minimalmodbusライブラリを使用して、RCONコントローラに接続し、サーボのオン/オフ、アラームのリセット、原点復帰、ポジション番号への移動を行うプログラムを作成します。また、指定されたポジション番号への移動を繰り返し行い、qキーが押されたときにループを停止する機能も追加します。
コントロールするロボット

使用するライブラリ
-
minimalmodbus: Modbus RTUプロトコルを簡単に扱うためのライブラリです。 -
serial: シリアル通信を扱うライブラリです。 -
time: 時間関連の操作を行う標準ライブラリです。 -
keyboard: キーボード入力を扱うためのライブラリです。
まずは、必要なライブラリをインストールしましょう。
pip install minimalmodbus pyserial keyboard
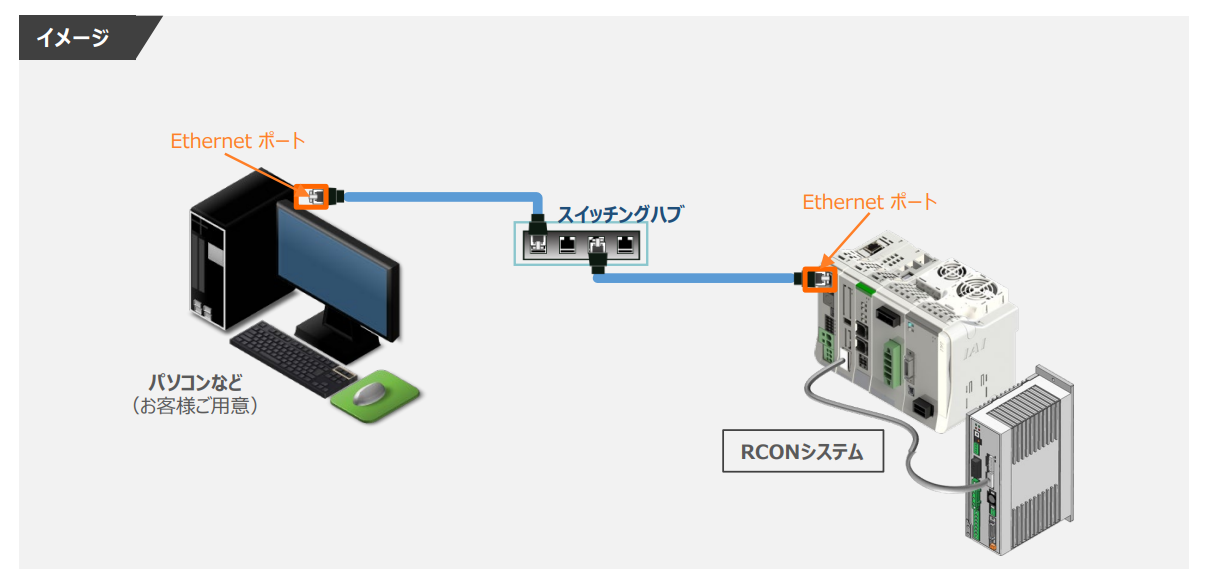
システムのイメージ
今回はTCP/IPではなくSerial接続のケースを解説します。
プログラムの全体像
以下に、完成したプログラムのコードを示します。各部分について詳細に解説していきます。
import minimalmodbus
import serial
import time
import keyboard
class RCONController:
def __init__(self, port, slave_address):
self.port = port
self.slave_address = slave_address
self.instrument = None
def connect(self):
minimalmodbus.BAUDRATE = 115200
minimalmodbus.BYTESIZE = 8
minimalmodbus.STOPBITS = 1
minimalmodbus.TIMEOUT = 1
minimalmodbus.PARITY = serial.PARITY_NONE
minimalmodbus.CLOSE_PORT_AFTER_EACH_CALL = True
try:
self.instrument = minimalmodbus.Instrument(self.port, self.slave_address, mode=minimalmodbus.MODE_RTU)
print(f"Connected to {self.port} with slave address {self.slave_address}")
except IOError:
print("Failed to connect to the instrument")
def check_connection(self):
if not self.instrument:
print("Not connected to any instrument")
return
try:
response = self.instrument.read_register(0, 1) # レジスタアドレス0から1ワード読み取る
print(f"Response: {response}")
except IOError:
print("Failed to communicate with the instrument")
def reset_alarm(self):
if not self.instrument:
print("Not connected to any instrument")
return
try:
register_address = 0x0D00 # レジスタアドレス(16進数表記)
value_to_write = 0x0001 # 書き込む値(16進数表記)
self.instrument.write_register(register_address, value_to_write, functioncode=6)
print("アラームリセットコマンドを送信しました。")
# 正常リスポンスの受信
read_value = self.instrument.read_register(register_address)
print(f'Read Value: {read_value}')
except IOError:
print("Failed to send Alarm Reset command")
def servo_on(self):
if not self.instrument:
print("Not connected to any instrument")
return
try:
register_address = 0x0D00 # レジスタアドレス(16進数表記)
value_to_write = 0x1000 # データ(16進数表記)
self.instrument.write_register(register_address, value_to_write, functioncode=6)
print("サーボONコマンドを送信しました。")
# 現在のサーボ状態の読み取り
servo_status = self.instrument.read_register(register_address, functioncode=3)
print(f'Servo Status: {servo_status}')
except IOError:
print("Failed to send Servo ON command")
def home(self):
if not self.instrument:
print("Not connected to any instrument")
return
try:
register_address = 0x0D00 # レジスタアドレス(16進数表記)
value_to_write = 0x1010 # 書き込む値(16進数表記)
dss1_register = 0x9005 # DSS1レジスタのアドレス(マニュアルに基づく)
# 原点復帰指令の送信
self.instrument.write_register(register_address, value_to_write, functioncode=6)
print("原点復帰コマンドを送信しました。")
# 原点復帰が完了するまで待機
while not self.is_home_complete(dss1_register):
time.sleep(0.1) # 100ms待機
print("原点復帰が完了しました。")
except IOError:
print("Failed to send Home command")
def is_home_complete(self, dss1_register):
try:
status = self.instrument.read_register(dss1_register, functioncode=3)
hend_bit = (status & 0x0010) >> 4 # HENDビット(ビット4)を抽出
print(f"status, {status}")
print(f"status & 0x0010, {status & 0x0010}")
print(f"(status & 0x0010) >> 4, {(status & 0x0010) >> 4} ")
if hend_bit == 1:
print("原点復帰が完了しました。")
else:
print("原点復帰はまだ完了していません。")
return hend_bit # HENDビットが1であれば原点復帰完了
except IOError:
print("Failed to read DSS1 register")
return False
def move_to_position_number(self, position_number):
if not self.instrument:
print("Not connected to any instrument")
return
try:
move_command_register = 0x9800 # ポジション番号指定のためのレジスタアドレス
position_status_register = 0x9014 # 完了ポジション番号を確認するためのレジスタアドレス
# ポジション番号指定のコマンド送信
self.instrument.write_register(move_command_register, position_number, functioncode=6)
print(f"ポジション番号{position_number}への移動コマンドを送信しました。")
# 移動完了の確認
def is_move_complete():
status = self.instrument.read_register(position_status_register, functioncode=3)
return (status & (1 << (position_number - 1))) != 0
# 移動が完了するまで待機
while not is_move_complete():
time.sleep(0.1) # 100ms待機
# 完了ポジション番号を取得
completed_position = self.instrument.read_register(position_status_register, functioncode=3)
print(f"完了ポジション番号: {completed_position}")
except IOError:
print("Failed to move to the specified position number")
# メイン処理
if __name__ == "__main__":
rcon = RCONController('COM4', 1)
rcon.connect()
rcon.check_connection()
rcon.reset_alarm()
rcon.servo_on()
rcon.home()
print("Press 'q' to stop the loop.")
while True:
rcon.move_to_position_number(2)
print(f"ポジションNo.2への移動が完了しました。")
rcon.move_to_position_number(1)
print(f"ポジションNo.1への移動が完了しました。")
if keyboard.is_pressed('q'):
print("Stopping the loop.")
break
プログラムの詳細解説
1. クラスの初期化
class RCONController:
def __init__(self, port, slave_address):
self.port = port
self.slave_address = slave_address
self.instrument = None
RCONControllerクラスの初期化メソッドでは、シリアルポートとスレーブアドレスを受け取り、Modbus通信を行うためのインストゥルメントを初期化します。
2. 接続メソッド
def connect(self):
minimalmodbus.BAUDRATE = 115200
minimalmodbus.BYTESIZE = 8
minimalmodbus.STOPBITS = 1
minimalmodbus.TIMEOUT = 1
minimalmodbus.PARITY = serial.PARITY_NONE
minimalmodbus.CLOSE_PORT_AFTER_EACH_CALL = True
try:
self.instrument = minimalmodbus.Instrument(self.port, self.slave_address, mode=minimalmodbus.MODE_RTU)
print(f"Connected to {self.port} with slave address {self.slave_address}")
except IOError:
print("Failed to connect to the instrument")
connect
メソッドでは、Modbus通信のパラメータを設定し、指定されたシリアルポートとスレーブアドレスで接続を確立します。接続が成功すると、インストゥルメントが初期化され、成功メッセージが表示されます。
3. 接続確認メソッド
def check_connection(self):
if not self.instrument:
print("Not connected to any instrument")
return
try:
response = self.instrument.read_register(0, 1) # レジスタアドレス0から1ワード読み取る
print(f"Response: {response}")
except IOError:
print("Failed to communicate with the instrument")
check_connectionメソッドでは、指定されたレジスタアドレスからデータを読み取り、接続が正しく確立されているかを確認します。
4. アラームリセットメソッド
def reset_alarm(self):
if not self.instrument:
print("Not connected to any instrument")
return
try:
register_address = 0x0D00 # レジスタアドレス(16進数表記)
value_to_write = 0x0001 # 書き込む値(16進数表記)
self.instrument.write_register(register_address, value_to_write, functioncode=6)
print("アラームリセットコマンドを送信しました。")
# 正常リスポンスの受信
read_value = self.instrument.read_register(register_address)
print(f'Read Value: {read_value}')
except IOError:
print("Failed to send Alarm Reset command")
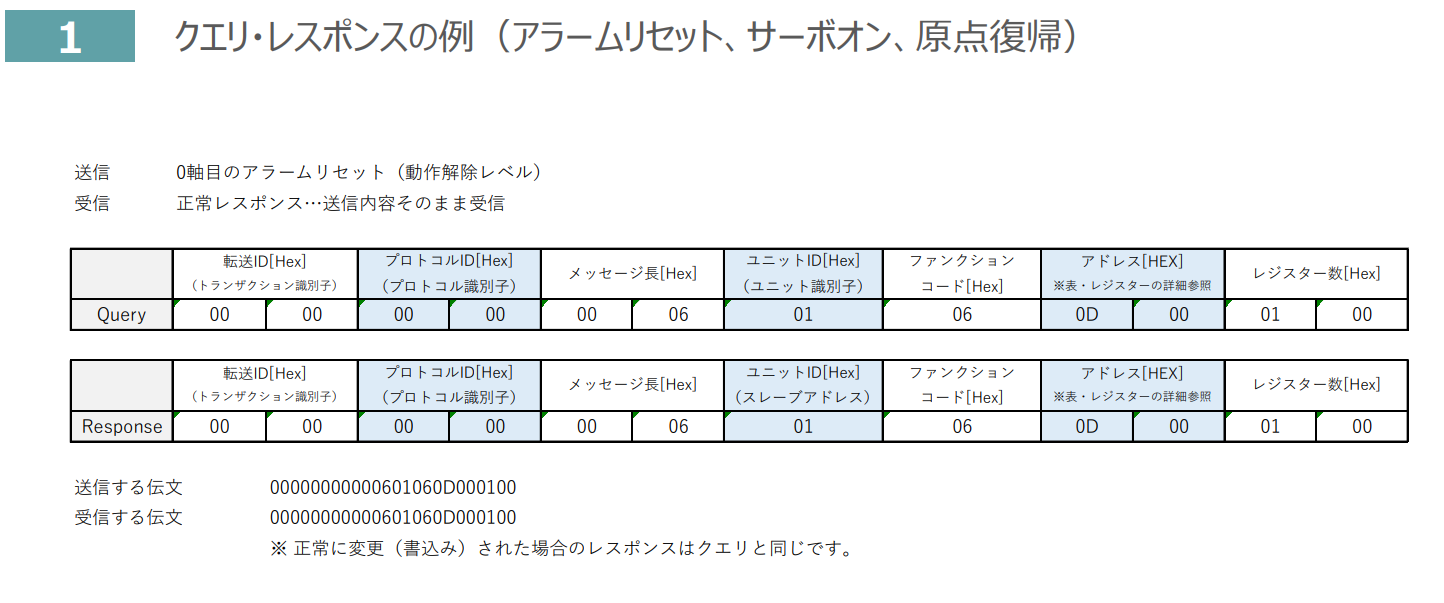
reset_alarmメソッドでは、アラームリセットコマンドを送信し、正常にリセットされたかを確認します。
ちなみに、マニュアルではこのような記載になっています。このマニュアルに準拠して、コードを作成します。
5. サーボオンメソッド
def servo_on(self):
if not self.instrument:
print("Not connected to any instrument")
return
try:
register_address = 0x0D00 # レジスタアドレス(16進数表記)
value_to_write = 0x1000 # データ(16進数表記)
self.instrument.write_register(register_address, value_to_write, functioncode=6)
print("サーボONコマンドを送信しました。")
# 現在のサーボ状態の読み取り
servo_status = self.instrument.read_register(register_address, functioncode=3)
print(f'Servo Status: {servo_status}')
except IOError:
print("Failed to send Servo ON command")
servo_onメソッドでは、サーボをオンにするコマンドを送信し、現在のサーボ状態を確認します。
6. 原点復帰メソッド
def home(self):
if not self.instrument:
print("Not connected to any instrument")
return
try:
register_address = 0x0D00 # レジスタアドレス(16進数表記)
value_to_write = 0x1010 # 書き込む値(16進数表記)
dss1_register = 0x9005 # DSS1レジスタのアドレス(マニュアルに基づく)
# 原点復帰指令の送信
self.instrument.write_register(register_address, value_to_write, functioncode=6)
print("原点復帰コマンドを送信しました。")
# 原点復帰が完了するまで待機
while not self.is_home_complete(dss1_register):
time.sleep(0.1) # 100ms待機
print("原点復帰が完了しました。")
except IOError:
print("Failed to send Home command")
homeメソッドでは、原点復帰コマンドを送信し、原点復帰が完了するまで待機します。
7. 原点復帰完了確認メソッド
def is_home_complete(self, dss1_register):
try:
status = self.instrument.read_register(dss1_register, functioncode=3)
hend_bit = (status & 0x0010) >> 4 # HENDビット(ビット4)を抽出
print(f"status, {status}")
print(f"status & 0x0010, {status & 0x0010}")
print(f"(status & 0x0010) >> 4, {(status & 0x0010) >> 4} ")
if hend_bit == 1:
print("原点復帰が完了しました。")
else:
print("原点復帰はまだ完了していません。")
return hend_bit # HENDビットが1であれば原点復帰完了
except IOError:
print("Failed to read DSS1 register")
return False
is_home_completeメソッドでは、原点復帰が完了したかどうかを確認します。DSS1レジスタのHENDビットをチェックします。
8. ポジション番号への移動メソッド
ポジション番号とは、RCONの内部に、以下のように移動条件を記録することが可能です。
この事例では、ポジション番号1とポジション番号2の間を往復する内容にします。

def move_to_position_number(self, position_number):
if not self.instrument:
print("Not connected to any instrument")
return
try:
move_command_register = 0x9800 # ポジション番号指定のためのレジスタアドレス
position_status_register = 0x9014 # 完了ポジション番号を確認するためのレジスタアドレス
# ポジション番号指定のコマンド送信
self.instrument.write_register(move_command_register, position_number, functioncode=6)
print(f"ポジション番号{position_number}への移動コマンドを送信しました。")
# 移動完了の確認
def is_move_complete():
status = self.instrument.read_register(position_status_register, functioncode=3)
return (status & (1 << (position_number - 1))) != 0
# 移動が完了するまで待機
while not is_move_complete():
time.sleep(0.1) # 100ms待機
# 完了ポジション番号を取得
completed_position = self.instrument.read_register(position_status_register, functioncode=3)
print(f"完了ポジション番号: {completed_position}")
except IOError:
print("Failed to move to the specified position number")
move_to_position_numberメソッドでは、指定されたポジション番号に移動するコマンドを送信し、移動が完了するまで待機します。
9. メイン処理
if __name__ == "__main__":
rcon = RCONController('COM4', 1)
rcon.connect()
rcon.check_connection()
rcon.reset_alarm()
rcon.servo_on()
rcon.home()
print("Press 'q' to stop the loop.")
while True:
rcon.move_to_position_number(2)
print(f"ポジションNo.2への移動が完了しました。")
rcon.move_to_position_number(1)
print(f"ポジションNo.1への移動が完了しました。")
if keyboard.is_pressed('q'):
print("Stopping the loop.")
break
メイン処理では、RCONコントローラに接続し、アラームをリセット、サーボをオン、原点復帰を行います。その後、ポジション番号2と1への移動を繰り返し、qキーが押されたときにループを停止します。
結論
このプログラムは、IAI RCONコントローラをModbus RTUを使用して制御するための基本的な操作を実装しています。これを基に、さらに複雑な制御システムを構築することができます。Pythonとminimalmodbusライブラリを使用することで、Modbus通信を簡単に扱うことができ、工業用デバイスの制御に役立つツールとなるでしょう。
注意事項
- 実行前に、接続するデバイスのシリアルポートやスレーブアドレスを正しく設定してください。
- 実行中に予期しない動作が発生した場合は、すぐに停止してください。
参考資料
- minimalmodbus ドキュメント
- IAI Modbus Manual
- IAI RCon Manual