LeRobot: State-of-the-art AI for real-world robotics
- 最先端のRobotics分野の学習モデルやデータセット,実ロボットのツールを提供 ロボティクスAIや学習モデル,データセットに入門する人のバリアを減らすためのツール
- 模倣学習及び強化学習にフォーカス
- 最新の事前学習済みモデル,人間のデモで収集したデータセット,シミュレーション環境などを提供 簡易な実ロボットも提供予定
Install
condaで仮想環境を作る
git clone https://github.com/huggingface/lerobot.git
cd lerobot
conda create -y -n lerobot python=3.10
conda activate lerobot
pip install -e .
エラーが出た場合はcmakeやbuild-essentialsのインストールが必要
sudo apt-get install cmake build-essential
シミュレーションでは以下のようなロボットが使える.使用する場合は追加のインストールが必要
pip install -e ".[aloha, pusht, xarm]"
wandbを使う場合はログインする
wandb login
Walk through
リポジトリの構成は以下
.
├── examples # いろんなプログラム例が入っている
| └── advanced # より高度なプログラム例
├── lerobot
| ├── configs # 設定ファイル コマンドラインで上書き可能
| | ├── default.yaml # デフォルト diffusion policyのpusht環境
| | ├── env # シミュレータ環境とデータセット: aloha.yaml, pusht.yaml, xarm.yaml
| | └── policy # 行動方策モデル: act.yaml, diffusion.yaml, tdmpc.yaml
| ├── common # contains classes and utilities
| | ├── datasets # 人間が操作して集めたデータセット: aloha, pusht, xarm
| | ├── envs # シミュレータ環境: aloha, pusht, xarm
| | ├── policies # 行動方策: act, diffusion, tdmpc
| | ├── robot_devices # 実デバイス: dynamixel motors, opencv cameras, koch robots
| | └── utils # various utilities
| └── scripts # コマンドラインで実行するプログラム
| ├── eval.py # 方策を読み込んで評価する
| ├── train.py # 学習
| ├── control_robot.py # 遠隔操作用のコード
| ├── push_dataset_to_hub.py # データセットをLerobotのデータ形式に変換するコード
| └── visualize_dataset.py # データセットを読み込んで可視化する
├── outputs # 結果を出力するフォルダ
└── tests # テスト用
Visualize datasets
どんなデータが内包されているのか可視化して確認できる
例えば,以下のデータセットを読み込んである特定のエピソードを可視化する
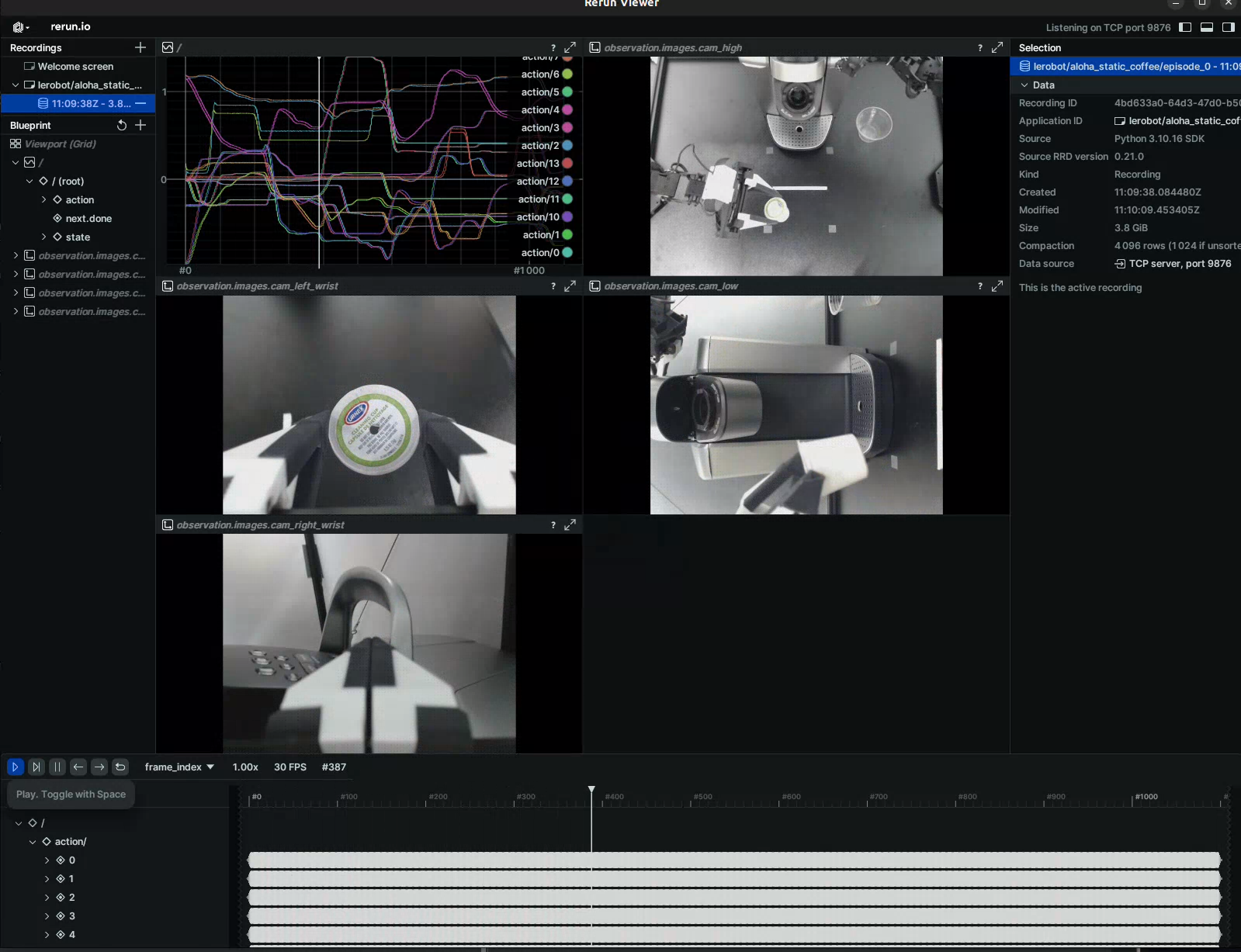
python lerobot/scripts/visualize_dataset.py --repo-id lerobot/aloha_static_coffee --episode-index 0
UIが表示され,データが可視化される
ローカルに落としたデータセットを読み込むことも可能 例えば
python lerobot/scripts/visualize_dataset.py \
--repo-id lerobot/pusht \
--root ./my_local_data_dir \
--local-files-only 1 \
--episode-index 0
LeRobotDataset format
Hugginfaceのデータセットを内包 更に情報が追加されている
dataset attributes:
├ hf_dataset: a Hugging Face dataset (backed by Arrow/parquet). Typical features example:
│ ├ observation.images.cam_high (VideoFrame):
│ │ VideoFrame = {'path': path to a mp4 video, 'timestamp' (float32): timestamp in the video}
│ ├ observation.state (list of float32): position of an arm joints (for instance)
│ ... (more observations)
│ ├ action (list of float32): goal position of an arm joints (for instance)
│ ├ episode_index (int64): index of the episode for this sample
│ ├ frame_index (int64): index of the frame for this sample in the episode ; starts at 0 for each episode
│ ├ timestamp (float32): timestamp in the episode
│ ├ next.done (bool): indicates the end of en episode ; True for the last frame in each episode
│ └ index (int64): general index in the whole dataset
├ episode_data_index: contains 2 tensors with the start and end indices of each episode
│ ├ from (1D int64 tensor): first frame index for each episode — shape (num episodes,) starts with 0
│ └ to: (1D int64 tensor): last frame index for each episode — shape (num episodes,)
├ stats: a dictionary of statistics (max, mean, min, std) for each feature in the dataset, for instance
│ ├ observation.images.cam_high: {'max': tensor with same number of dimensions (e.g. `(c, 1, 1)` for images, `(c,)` for states), etc.}
│ ...
├ info: a dictionary of metadata on the dataset
│ ├ codebase_version (str): this is to keep track of the codebase version the dataset was created with
│ ├ fps (float): frame per second the dataset is recorded/synchronized to
│ ├ video (bool): indicates if frames are encoded in mp4 video files to save space or stored as png files
│ └ encoding (dict): if video, this documents the main options that were used with ffmpeg to encode the videos
├ videos_dir (Path): where the mp4 videos or png images are stored/accessed
└ camera_keys (list of string): the keys to access camera features in the item returned by the dataset (e.g. `["observation.images.cam_high", ...]`)
データセットの使い方は第2回で詳しく学ぶ予定
Evaluate a pretrained policy
学習済みモデルを評価するスクリプト 例えば
python lerobot/scripts/eval.py -p lerobot/act_aloha_sim_transfer_cube_human eval.n_episodes=20 eval.batch_size=10
ローカル環境にあるモデルを指定するときも-pでいける
python lerobot/scripts/eval.py -p {OUTPUT_DIR}/checkpoints/last/pretrained_model
Train your own policy
自分の環境およびデータセットで学習するスクリプト 例えば
python lerobot/scripts/train.py policy=act env=aloha env.task=AlohaTransferCube-v0 dataset_repo_id=lerobot/aloha_sim_transfer_cube_human
outputの場所を指定したいときは
hydra.run.dir=path/to/output/dir
を指定する
wandbを使うときは
wandb.enable=true
を追加
ざっくりとした使い方は以上 次回からはexampleを見ていく
Link
目次