はじめに
GazeboとROSを使用してとシミュレーションを行う場合に、Gazebo上にオブジェクトをspawn/deleteする方法がいくつかあるのでまとめます。
本記事では、以下の方法を紹介します。
- spawnする方法
- spawn_entity.pyノードを使用する
- ROSサービスを使用する
- deleteする方法
- ROSサービスを使用する
環境
以下の環境で動作を確認しています。
| 項目 | バージョン |
|---|---|
| Ubuntu | 22.04 |
| ROS2 | Humble |
| Gazebo (Gazebo Classic) | Gazebo 11 |
Gazeboのバージョンについては以下の記事が参考になります。
spawnする方法
ROSノードを使用する
gazebo_rosパッケージ内に、spawn_entity.pyノードがあります。
-hオプションで起動方法を確認することができます。
最低限、以下の3つのうちどれかでオブジェクトの定義ファイルを指定して、
(-file FILE_NAME | -topic TOPIC_NAME | -database ENTITY_NAME | -stdin)
以下のオプションでオブジェクトの名前を指定すればspawnすることができます。
-entity ENTITY_NAME
$ ros2 run gazebo_ros spawn_entity.py -h
usage: spawn_entity.py [-h] (-file FILE_NAME | -topic TOPIC_NAME | -database ENTITY_NAME | -stdin) -entity ENTITY_NAME
[-reference_frame REFERENCE_FRAME] [-gazebo_namespace GAZEBO_NAMESPACE]
[-robot_namespace ROBOT_NAMESPACE] [-timeout TIMEOUT] [-unpause] [-wait ENTITY_NAME]
[-spawn_service_timeout TIMEOUT] [-x X] [-y Y] [-z Z] [-R R] [-P P] [-Y Y] [-package_to_model] [-b]
Spawn an entity in gazebo. Gazebo must be started with gazebo_ros_init, gazebo_ros_factory and gazebo_ros_state for all
functionalities to work
options:
-h, --help show this help message and exit
-file FILE_NAME Load entity xml from file
-topic TOPIC_NAME Load entity xml published on topic -database ENTITY_NAME Load entity XML from specified entity in GAZEBO_MODEL_PATH or Gazebo Model Database
-stdin Load entity from stdin
-entity ENTITY_NAME Name of entity to spawn
-reference_frame REFERENCE_FRAME
Name of the model/body where initial pose is defined. If left empty or specified as "world",
gazebo world frame is used
-gazebo_namespace GAZEBO_NAMESPACE
ROS namespace of gazebo offered ROS interfaces. Default is without any namespace
-robot_namespace ROBOT_NAMESPACE
change ROS namespace of gazebo-plugins
-timeout TIMEOUT Number of seconds to wait for the spawn and delete services to become available
-unpause unpause physics after spawning entity
-wait ENTITY_NAME Wait for entity to exist
-spawn_service_timeout TIMEOUT
DEPRECATED: Use '-timeout' instead.
-x X x component of initial position, meters
-y Y y component of initial position, meters
-z Z z component of initial position, meters
-R R roll angle of initial orientation, radians
-P P pitch angle of initial orientation, radians
-Y Y yaw angle of initial orientation, radians
-package_to_model convert urdf <mesh filename="package://..." to <mesh filename="model://..."
-b bond to gazebo and delete the entity when this program is interrupted
~/ros2_ws/srcにturtlebot3_simulations_jp_customがある環境だと以下でロボットをspawnすることができます。
また、ここでは-fileオプションでロボットのSDFファイルを指定しています。
ros2 run gazebo_ros spawn_entity.py -file ~/ros2_ws/src/turtlebot3_simulations_jp_custom/turtlebot3_gazebo/models/turtlebot3_burger/model.sdf -entity robot

ほかにも、以下の方法でspawnするオブジェクトを指定できます。
-
-topic:robot_descriptionトピック -
-database: GAZEBO_MODELパスが通っているディレクトリ内のオブジェクト -
-stdin: 標準入力でXMLを指定
ROSサービスを使用する
GazeboをROSのライブラリと一緒に起動すると、/spawn_entityというROSサービスのサーバも一緒に起動されます。このサービスをcallすることでオブジェクトをspawnすることができます。
サービスのTypeはgazebo_msgs/srv/SpawnEntityです。
実は上記のROSノードもこのサービスを使用しているので、指定できるパラメータの中身は実質同一です。
$ ros2 service type /spawn_entity
gazebo_msgs/srv/SpawnEntity
string name # Name of the entity to be spawned (optional).
string xml # Entity XML description as a string, either URDF or SDF.
string robot_namespace # Spawn robot and all ROS interfaces under this namespace
geometry_msgs/Pose initial_pose # Initial entity pose.
string reference_frame # initial_pose is defined relative to the frame of this entity.
# If left empty or "world" or "map", then gazebo world frame is
# used.
# If non-existent entity is specified, an error is returned
# and the entity is not spawned.
---
bool success # Return true if spawned successfully.
string status_message # Comments if available.
以下がシンプルなspwanのスクリプトです。
あくまでとてもシンプルな例です。以下の点に気を付けてください。
-
spawn_client.call_async(req)の返り値のFutureを適切に処理した方がよいです - nodeを
destroy_node()で適切に終了した方がよいです
import os
import rclpy
from gazebo_msgs.srv import SpawnEntity
from ament_index_python import get_package_share_directory
rclpy.init()
node = rclpy.create_node("spawn_node")
spawn_client = node.create_client(SpawnEntity, "/spawn_entity")
req = SpawnEntity.Request()
file_path = os.path.join(
get_package_share_directory("turtlebot3_gazebo"),
"models",
"turtlebot3_burger",
"model.sdf",
)
req.name = "robot"
req.xml = open(file_path, "r").read()
spawn_client.call_async(req)
複数台のオブジェクトをspawnする場合は name,robot_namespace,initial_poseをそれぞれのオブジェクトで指定しましょう。
import os
import rclpy
from gazebo_msgs.srv import SpawnEntity
from ament_index_python import get_package_share_directory
rclpy.init()
node = rclpy.create_node("spawn_node")
spawn_client = node.create_client(SpawnEntity, "/spawn_entity")
req = SpawnEntity.Request()
file_path = os.path.join(
get_package_share_directory("turtlebot3_gazebo"),
"models",
"turtlebot3_burger",
"model.sdf",
)
for i in range(5):
req.name = f"robot{i}"
req.xml = open(file_path, "r").read()
req.robot_namespace = f"robot_{i}"
req.initial_pose.position.x = 0.0
req.initial_pose.position.y = float(i)
spawn_client.call_async(req)
以下のように5台spawnすることができました。

namespaceも反映されています。
$ ros2 node list
/gazebo
/robot_0/turtlebot3_diff_drive
/robot_0/turtlebot3_imu
/robot_0/turtlebot3_joint_state
/robot_0/turtlebot3_laserscan
/robot_1/turtlebot3_diff_drive
/robot_1/turtlebot3_imu
/robot_1/turtlebot3_joint_state
/robot_1/turtlebot3_laserscan
/robot_2/turtlebot3_diff_drive
/robot_2/turtlebot3_imu
/robot_2/turtlebot3_joint_state
/robot_2/turtlebot3_laserscan
/robot_3/turtlebot3_diff_drive
/robot_3/turtlebot3_imu
/robot_3/turtlebot3_joint_state
/robot_3/turtlebot3_laserscan
/robot_4/turtlebot3_diff_drive
/robot_4/turtlebot3_imu
/robot_4/turtlebot3_joint_state
/robot_4/turtlebot3_laserscan
コマンドラインから実行するためには、以下のコマンドでオブジェクトのXMLを指定する必要があるのですが、直接XMLを記載するとYAMLをパースする際にエラーが出てしまいます。なにか解決方法がわかったら追記します。
ros2 service call /spawn_entity gazebo_msgs/srv/SpawnEntity "{name: "robot" xml: **XML**}"
yaml.scanner.ScannerError: while scanning for the next token
found character '>' that cannot start any token
in "<unicode string>", line 1, column 43:
... ple, xml: "<?xml version="1.0" ?><sdf version="1.5"><model name= ...
^
deleteする方法
ROSサービスを使用する
deleteする方法は単純で、Gazebo上で管理されている名前を指定してROSサービスをcallします。
こちらもspawnの際と同様、GazeboをROSのライブラリと一緒に起動すると、/delete_entityというROSサービスのサーバも一緒に起動されます。このサービスをcallすることでオブジェクトをdeleteすることができます。
サービスのTypeはgazebo_msgs/srv/SpawnEntityです。
$ ros2 service type /delete_entity
gazebo_msgs/srv/DeleteEntity
string name # Name of the Gazebo entity to be deleted. This can be either
# a model or a light.
---
bool success # Return true if deletion is successful.
string status_message # Comments if available.
ここで指定する名前はGazebo側で管理されている名前です。spawn_entity.pyで指定したentity、またはROSサービスで指定したnameです。
Gazeboの左側のメニューからも確認することができます。
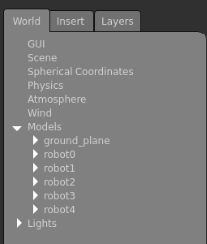
以下のコマンドでrobot0のオブジェクトを消すことができます。
ros2 service call /delete_entity gazebo_msgs/srv/DeleteEntity "{name: robot0}"
Pythonだと以下のように書くことができます。
import rclpy
from gazebo_msgs.srv import DeleteEntity
rclpy.init()
node = rclpy.create_node("delete_node")
delete_client = node.create_client(DeleteEntity, "/delete_entity")
req = DeleteEntity.Request()
req.name = "robot"
delete_client.call_async(req)
おわりに
Gazebo上にオブジェクトをspwan/deleteする以下の方法をまとめました。
- spawnする方法
- spawn_entity.pyノードを使用する
- ROSサービスを使用する
- deleteする方法
- ROSサービスを使用する
参考
今回出てきたTurtlebot3は以下のリポジトリのものです。