の続き
キャプチャ
操作方法
- 画面左端のグラフ上で座標を左クリックで選択
- 右クリックまたはウィンドウを閉じる操作で終了
- 無操作タイムアウトでの終了は86400秒(丸一日)
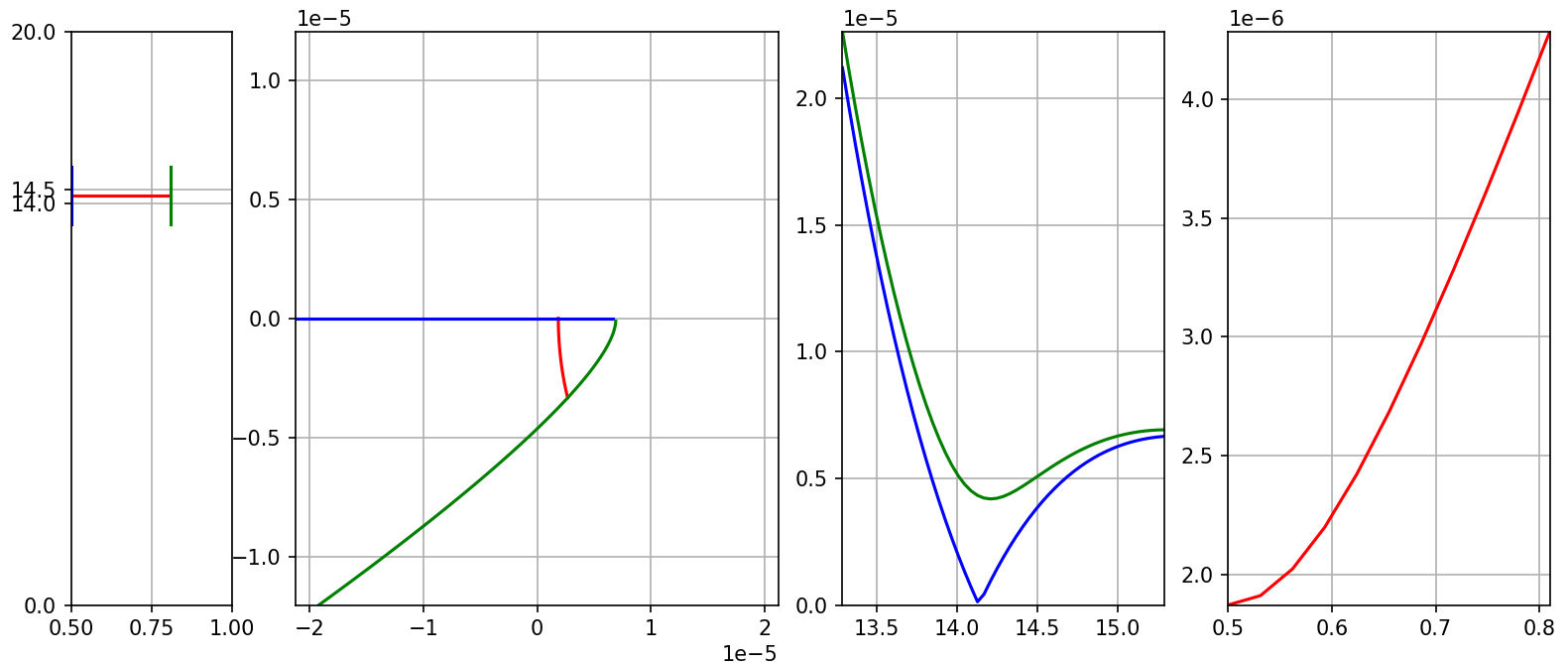
左端のグラフから順に
- $s$
- $\xi(s) =\pi^{-\frac{s}{2}}\Gamma\left(\frac{s}{2}\right)\zeta(s)$
- $|\xi(s))|$ (横軸は$Im(s)$)
- $|\xi(s))|$ (横軸は$Re(s)$)
ソースコード
import matplotlib.pyplot as plt
from matplotlib import _pylab_helpers
# import cmath
import numpy as np
import mpmath
mpmath.mp.dps = 12
def zeta_relist_im_abs(re_list,im):
z_re = np.zeros(len(re_list))
z_im = np.zeros(len(re_list))
z_abs = np.zeros(len(re_list))
for i in range(len(re_list)):
s = re_list[i] + im*1j
tmp = mpmath.zeta(s)*mpmath.gamma(0.5*s)*mpmath.power(mpmath.pi,-0.5*s)
z_re[i] = tmp.real
z_im[i] = tmp.imag
z_abs[i] = abs(tmp)
# z_arg[i] = cmath.phase(tmp)
return z_re,z_im,z_abs
def zeta_re_imlist_abs(re,im_list):
z_re = np.zeros(len(im_list))
z_im = np.zeros(len(im_list))
z_abs = np.zeros(len(im_list))
for i in range(len(im_list)):
s = re + im_list[i]*1j
tmp = mpmath.zeta(s)*mpmath.gamma(0.5*s)*mpmath.power(mpmath.pi,-0.5*s)
z_re[i] = tmp.real
z_im[i] = tmp.imag
z_abs[i] = abs(tmp)
# z_arg[i] = cmath.phase(tmp)
return z_re,z_im,z_abs
def main():
RE_N=11
IM_N=51
# RE_AMP=0.1
IM_AMP=1
fig,axes = plt.subplots(1, 4, figsize=(13,5), gridspec_kw= {'width_ratios': [1, 3, 2, 2]})
axes[0].set_xticks([0.5,0.75,1])
axes[0].set_xlim((0.5,1))
axes[0].set_yticks([0,14,14.5,20])
axes[0].set_ylim((0,20))
axes[0].grid()
axes[1].grid()
axes[2].grid()
axes[3].grid()
# ハンドル取得のため一度plot
lines00, = axes[0].plot([0,1], [0,0],"r") # s Re part sweep
lines01, = axes[0].plot([0,1], [0,0],"b") # s Im part sweep s_re
lines03, = axes[0].plot([0,1], [0,0],"g") # s Im part sweep s_re max
lines10, = axes[1].plot([0,1], [0,0],"r") # zeta_xi(s) Re part sweep
lines11, = axes[1].plot([0,1], [0,0],"b") # zeta_xi(s) Im part sweep
lines13, = axes[1].plot([0,1], [0,0],"g") # zeta_xi(s) Im part sweep s_re max
lines21, = axes[2].plot([0,1], [0,0],"b") # abs(zeta(s)) Im part sweep
lines23, = axes[2].plot([0,1], [0,0],"g") # abs(zeta(s)) Im part sweep s_re max
# lines24, = axes[2].plot([0,1], [0,0],"y") # diff of abs(zeta(s))
lines3, = axes[3].plot([0,1], [0,0],"r") # abs(zeta(s)) Re part sweep
while True:
manager = _pylab_helpers.Gcf.get_active()
if manager is None:
print('closed')
break
points = plt.ginput(n=1, timeout=86400, mouse_add=1, mouse_pop=2, mouse_stop=3)
# a = plt.ginput(n=-1, mouse_add=1, mouse_pop=3, mouse_stop=2)
# n=-1でインプットが終わるまで座標を取得
# mouse_addで座標を取得(左クリック)
# mouse_popでUndo(ミドルクリック)
# mouse_stopでインプットを終了する(右クリック)
if len(points)==1:
re = 0.5
re_max,im = points[0]
print(re_max, im)
re_list = np.zeros(RE_N)
im_list_dummy = np.zeros(RE_N)
re_list_dummy = np.zeros(IM_N)
re_list_dummy3 = np.zeros(IM_N)
im_list = np.zeros(IM_N)
for i in range(RE_N):
re_list[i] = re + (re_max-re)*i/(RE_N-1)
im_list_dummy[i] = im
for i in range(IM_N):
re_list_dummy[i] = re
re_list_dummy3[i] = re_list[-1]
im_list[i] = im + IM_AMP*(i-(IM_N-1)/2)/((IM_N-1)/2)
axes[0].set_ylim(None)
lines00.set_data(re_list , im_list_dummy)
lines01.set_data(re_list_dummy , im_list )
lines03.set_data(re_list_dummy3, im_list )
# Re sweep
z_re1,z_im1,z_absr = zeta_relist_im_abs(re_list, im)
# Im sweep
z_re2,z_im2,z_abs2 = zeta_re_imlist_abs(re, im_list)
z_re4,z_im4,z_abs4 = zeta_re_imlist_abs(re_list[-1], im_list) # [-1] means last element of the list
lines10.set_data(z_re1, z_im1)
lines11.set_data(z_re2, z_im2)
lines13.set_data(z_re4, z_im4)
# z_abs_diff = z_abs4-z_abs2
lines21.set_data(im_list, z_abs2)
lines23.set_data(im_list, z_abs4)
#lines24.set_data(im_list, z_abs_diff)
#tmp_abs_max1 = max(abs(z_abs_diff.min()),abs(z_abs_diff.max()))
tmp_abs_max2 = abs(z_abs2.max())
tmp_abs_max1 = abs(z_abs4.max())
tmp_abs_max = max(tmp_abs_max1,tmp_abs_max2)
#tmp_min = min(0,z_abs_diff.min())
axes[2].set_xlim(im_list[0],im_list[-1])
#axes[2].set_ylim(tmp_min,tmp_abs_max)
axes[2].set_ylim(0,tmp_abs_max)
lines3.set_data(re_list, z_absr)
axes[3].set_xlim(re_list[0],re_list[-1])
tmp_abs_max = abs(z_absr.max())
tmp_abs_min = abs(z_absr.min())
axes[3].set_ylim(tmp_abs_min,tmp_abs_max)
tmp_abs_max1 = max(abs(z_re1.min()),abs(z_re1.max()),abs(z_re2.min()),abs(z_re2.max()),abs(z_re4.min()),abs(z_re4.max()))
tmp_abs_max2 = max(abs(z_im1.min()),abs(z_im1.max()),abs(z_im2.min()),abs(z_im2.max()),abs(z_im4.min()),abs(z_im4.max()))
axes[1].set_xlim((-tmp_abs_max1, tmp_abs_max1))
axes[1].set_ylim((-tmp_abs_max2, tmp_abs_max2))
#tmp_abs_max = max(tmp_abs_max1,tmp_abs_max2)
#axes[1].set_xlim((-tmp_abs_max, tmp_abs_max))
#axes[1].set_ylim((-tmp_abs_max, tmp_abs_max))
else:
print('quit by right click')
break
# plt.savefig('fig_test.png')
# plt.show()
# 次の描画(≒操作受付)までの待ち時間(秒)
plt.pause(0.05)
if __name__ == '__main__':
main()
参考記事
matplotlibで座標を取得