パラレルリンクロボット製作(メカ編)
パラレルリンクロボット、別名デルタロボットの製作メモ。
レゴでミニチュアを作る
閉リンク構造をしているパラレルリンクロボットは、開リンク構造のシリアルリンクロボットと違い、一見してその動作機構の仕組みを理解するのが難しいと感じました。
そこで、いきなりモーターで動作するロボットを作り始める前に、レゴで簡易なミニチュア模型を作ってみることにしました。
「レゴ パラレルリンクロボット」で検索すると、下記のサイトが見つかったため、こちらを参考に作成しました。
http://legokarakuri.blog91.fc2.com/blog-entry-15.html
部品は下記のサイトで1点ずつバラで買いました。
https://www.brickers.jp
欲しいレゴのパーツが1点単位で購入できてとても便利。
購入したパーツは下記になります。
| 型番 | 商品名 | 価格(税込) | 数量 | 小計 |
|---|---|---|---|---|
| 2736-194 | テクニック 軸 - ボール:[Light Bluish Gray / グレー] | 10 円 | 20個 | 200 円 |
| 2780-026 | テクニック コネクターペグ - 滑り止め:[Black / ブラック] | 4 円 | 20個 | 80 円 |
| 32073-194 | テクニック 5M 十字軸 39mm:[Light Bluish Gray / グレー] | 10 円 | 5本 | 50 円 |
| 4519-194 | テクニック 3M 十字軸 23mm:[Light Bluish Gray / グレー] | 5 円 | 10本 | 50 円 |
| 6558-023 | テクニック コネクターペグ 3M - 滑り止め:[Blue / ブルー] | 6 円 | 10個 | 60 円 |
| 41677-001 | テクニック リフトアーム 1 x 2 - 薄型:[White / ホワイト] | 23 円 | 10個 | 230 円 |
| 45590-026 | テクニック 軸コネクター - ゴム製:[Black / ブラック] | 48 円 | 6個 | 288 円 |
| 32316-194 | テクニック リフトアーム 1 x 5:[Light Bluish Gray / グレー] | 18 円 | 5本 | 90 円 |
| 41678-194 | テクニック 軸/ピンコネクター - 垂直ダブル:[Light Bluish Gray / グレー] | 20 円 | 10個 | 200 円 |
| 32293-026 | テクニック リンク 9L:[Black / ブラック] | 108 円 | 8本 | 864 円 |
| 4185-199 | テクニック ベルトホイール:[Dark Bluish Gray / ダークグレー] | 48 円 | 5個 | 240 円 |
※2、3個使わなかった部品も含まれてます
出来上がったのが、下記のミニチュアです。
手で動かしてみると、閉リンクを構成するアーム機構によって、床に対して平行な状態を維持したまま、ハンド部分が上下左右に動作することを確認できました。
このミニチュアを触っているだけでも結構楽しい。


3D CADソフトを使って3Dモデルを作る
ミニチュアで仕組みが理解できたので、実機の製作に取り掛かりました。
まずは、ロボットをどんな部品を使って作るかを決めます。
メインパーツとなるモータには、Dynamixelというスマートサーボモータを使うことにしました。
ホビー用途のロボットの製作によく使われているモータです。
マニュアルは下記。
http://support.robotis.com/jp/product/dynamixel/ax_series/dxl_ax_actuator.htm
Dynamixelモーター同士を接続するためのフレームパーツも販売されているので、なるべくこのフレームの組み合わせで構築できるようにデザインしてみました。
使うことにしたパーツは下記です。
| 部位 | 品名 |
|---|---|
| 胴体 | 3Dプリンタで自作 DMM.make |
| 肩1 | FP04-F3 |
| 肩2 | Dynamixel AX-12A |
| 上腕1 | FP04-F4 |
| 上腕2 | FP04-F2 |
| 肘+前腕+手首 | タミヤ 楽しい工作シリーズ 3mmネジシャフトセット |
| 手1 | FP04-F2 |
| 手2 | 3Dプリンタで自作 DMM.make |
使用する部品が決まったので、Fusion 360という3D CADソフトを利用して、デルタロボットのモデルを作成しました。
Fusion 360は個人ユース、スタートアップ企業ユースであれば、無償で利用ができます。
下記の本を一読すると、おおよそ必要な操作はマスターできます。
Fusion360操作ガイド ベーシック編―次世代クラウドベース3DCAD
2Dのスケッチを立体化して3Dモデルをさくさく作っていけるので楽しいです。
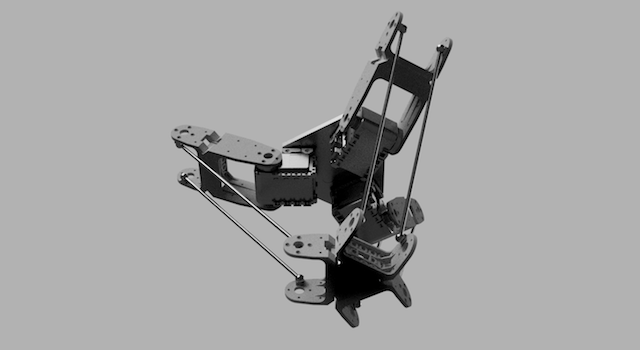
完成した3Dモデルが下記です。緑色の吹き出しが可動部になります。
Dynamixelモーターとフレームは3D CADのデータをダウンロードして利用しました。
http://www.besttechnology.co.jp/modules/knowledge/?BTX030B%20Dynamixel%20AX-12A#oea7f740

下から見たところ。
自作パーツを3Dプリントサービスを使って作成
デルタロボットの3Dモデルの中で胴体と手2はオリジナルパーツです。この2つのパーツを3Dプリンタで造形してみることにしました。
3Dプリンタは持っていないですし、近くにMakers labのようなお店もないので、ネットサービスを利用することにしました。DMM.make。
Fusion 360で作成したモデルをSTL形式でファイルに出力し、それをそのままDMM.makeのサイトにアップロードします。加工可能なモデルデータになっているかどうか自動チェックが走ります。OKであれば、素材や加工スピードなどを選んで注文ができます。注文してから1週間ほどで届きました。
組み立て
3Dプリントしたパーツが届いたあとで組み立て。ロボット部分は完成。

パラレルリンクロボットは上から吊るして使うため、土台となるスチールラックをダイソーで購入して設置。

