概要
ゲームAIに関して勉強し始めたので,その備忘録.
この記事ではフロッキングアルゴリズムについて記述する.
フロッキングアルゴリズムとは,群れ行動をシミュレートするアルゴリズムである.
実装方法は多種多様であると思うが,ここではBoidsを取り上げる.
なお,この記事では連続的なゲームを想定したサンプルを示す.
離散的なゲームでのフロッキングアルゴリズムも,考え方は同じである.
参考書
ありきたりではあるが以下の書籍を用いた.
ゲーム開発者のためのAI入門
Boids
概要
このアルゴリズムは1987年に発表された
Flocks, Herds, and Schools:A Distributed Behavioral Modelで提唱されたもので,
Boidsとは「シミュレートされた集団」を指し,Boidが各個体を指している.
このアルゴリズムは,以下の三つのルールで構成されている.
●結合:自分の視野範囲にいるBoidの平均位置に向かう.
●整列:自分の視野範囲にいるBoidの平均方向に向かう.
●分離:自分の視野範囲にいるBoidに近づきすぎている場合は,離れる方向に向かう.
各ルールを適用した時に算出される移動方向は累積され,
全ルール適用後の累積方向が,最終的な移動方向となる.
今回は上記ルールに加えて,以下のルールも適用している.
●障害物回避:自分の視線方向に障害物がある場合は避ける.
事前準備
ベクトル計算用の構造体,便利関数の準備と,
角度計算用のマクロの準備を行う.
//角度計算用マクロ.
# define L_PI (3.1415f)
# define L_2PI (6.2830f)
# define L_H_DEG (180.0000f)
# define L_DEG (360.0000f)
# define DEG2RAD(e) ((e)*(L_PI)/(L_H_DEG))
# define RAD2DEG(e) ((e)*(L_H_DEG)/(L_PI))
# define ADJUST_RAD(e) (((e)<(0.0000f))?(e)+(L_2PI):((e)>(L_2PI))?(e)-(L_2PI):(e))
# define ADJUST_DEG(e) (((e)<(0.0000f))?(e)+(L_DEG):((e)>(L_DEG))?(e)-(L_DEG):(e))
//ベクトル構造体.
# define VECTOR SVector2D<float>
template <class T>
struct SVector2D
{
typedef T DataType;
T x;
T y;
SVector2D(){ Init(); }
void Init()
{
x = T();
y = T();
}
SVector2D operator + ( const SVector2D& e ) const { SVector2D tmp; tmp.x = x + e.x; tmp.y = y + e.y; return tmp; }
SVector2D& operator += ( const SVector2D& e ){ x += e.x; y += e.y; return (*this); }
SVector2D operator - ( const SVector2D& e ) const { SVector2D tmp; tmp.x = x - e.x; tmp.y = y - e.y; return tmp; }
SVector2D& operator -= ( const SVector2D& e ){ x -= e.x; y -= e.y; return (*this); }
T operator * ( const SVector2D& e ) const { return ( x * e.x ) + ( y * e.y ); }
SVector2D& operator *= ( const int e ){ x *= e; y *= e; return (*this); }
SVector2D& operator *= ( const float e ){ x *= e; y *= e; return (*this); }
SVector2D& operator /= ( const int e ){ x /= e; y /= e; return (*this); }
SVector2D& operator /= ( const float e ){ x /= e; y /= e; return (*this); }
};
//数学関連の関数群.
namespace LMath
{
VECTOR::DataType GetScalar( VECTOR vec )
{
return sqrtf( vec.x * vec.x + vec.y * vec.y );
}
VECTOR Normalize( VECTOR vec )
{
const VECTOR::DataType vecLen = GetScalar( vec );
vec.x /= vecLen;
vec.y /= vecLen;
return vec;
}
VECTOR Normalize( VECTOR from, VECTOR to )
{
VECTOR tmp = to - from;
return Normalize( tmp );
}
float GetRotateRad( const float from, const float to )
{
//角度候補1.
const float dir1st = ( to - from );
const float dir1stVal = fabsf( dir1st );
//角度候補2.
const float dir2ndVal = ( L_2PI - dir1stVal );
const float dir2nd = ((dir1st>=0.0f)?-1.0f:1.0f) * dir2ndVal;
//絶対値が小さい方を採用.
return ( dir1stVal > dir2ndVal ) ? dir2nd : dir1st;
}
bool IsCollisionCircle( const VECTOR& pos1, const VECTOR& pos2, const float r )
{
VECTOR tmp = pos1 - pos2;
return ( GetScalar( tmp ) < r );
}
};
サンプル
//視野のrとθ
# define VIEW_RANGE_MAX (75.0f)
# define VIEW_RADIUS_MAX (DEG2RAD(180.0f))
//分離判定用閾値と最大分離角度.
# define SEPARATE_RANGE_MAX (30.0f)
# define SEPARATE_DIR_MAX (DEG2RAD(60.0f))
//障害物検知距離と障害物検知範囲,最大回避角度.
# define CHECK_OBSTACLE_DISTANCE ( 80.0f )
# define CHECK_OBSTACLE_RANGE ( 60.0f )
# define CHECK_OBSTACLE_RADIUS (DEG2RAD(60.0f))
//各種パラメータ.
VECTOR g_avePos;
float g_avePosNum;
float g_aveDir;
float g_aveDirNum;
float g_separateDir;
float g_obsAvoidDir;
void InitParam()
{
g_avePos.Init(); m_avePos.x = m_avePos.y = 0.0f;
g_avePosNum = 0;
g_aveDir = 0.0f;
g_aveDirNum = 0;
g_separateDir = 0.0f;
g_obsAvoidDir = 0.0f;
}
void Update( VECTOR& selfPos, float& selfDir, const float selfVel )
{
//初期化.
InitParam();
//現在方向の単位ベクトル.
VECTOR selfDirVec;
selfDirVec.x = cosf( selfDir );
selfDirVec.y = -sinf( selfDir );
//死角(ローカル座標での).
const float deadAngleStart = ADJUST_RAD( VIEW_RADIUS_MAX / 2.0f );
const float deadAngleEnd = ADJUST_RAD( -(VIEW_RADIUS_MAX / 2.0f) );
int inViewNum = 0;
VECTOR* posArray = /*周辺の動的モジュールの位置リスト*/;
float* dirArray = /*周辺の動的モジュールの方向リスト*/;
int arrayNum = /*動的モジュールリストのサイズ*/;
for( int i = 0; i < arrayNum; ++i ){
if( /*自分だったら*/ ){ continue; }
//距離チェック.
VECTOR relativePos = posArray[i] - selfPos;
const float relativeLen = LMath::GetScalar( relativePos );
if( relativeLen > VIEW_RANGE_MAX ){
continue;
}
//オブジェクトへの角度をベクトルから逆算.
float targetDir = ADJUST_RAD( atan2f( -relativePos.y, relativePos.x ) );
//自分を0度とした時の角度に変換
targetDir = ADJUST_RAD( targetDir - selfDir );
//死角なら考慮しない.
if( deadAngleStart <= targetDir && targetDir <= deadAngleEnd ){
continue;
}
//視界に入っているオブジェクトが増えた.
inViewNum++;
//結合の累積.
{
g_avePos += relativePos;
g_avePosNum++;
}
//整列の累積.
{
g_aveDir += LMath::GetRotateRad( selfDir, dirArray[i] );
g_aveDirNum++;
}
//分離の累積.
if( relativeLen <= SEPARATE_RANGE_MAX )
{
//オブジェクトがいる方向とは逆側に回転したい.
const float multi = ( targetDir <= L_PI ) ? -1.0f : 1.0f;
const float coef = ( SEPARATE_RANGE_MAX - relativeLen ) / SEPARATE_RANGE_MAX;
g_separateDir += multi * ( SEPARATE_DIR_MAX * coef );
}
}
//障害物検知.
VECTOR* obsPosArray = /*周辺の障害物の位置リスト*/;
int obsArrayNum = /*障害物リストのサイズ*/;
for( int i = 0; i < obsArrayNum; ++i ){
//障害物との距離.
VECTOR disObs = obsPosArray[i] - selfPos;
//視線上への正射影.
//(方向ベクトルが単位ベクトルじゃないと正しい長さは出ない).
VECTOR checkProject = selfDirVec;
checkProject *= ( disObs * selfDirVec );
//視線距離よりも正射影の方が長い場合は,そもそもチェック範囲に入っていないので無視.
const float projectScalar = LMath::GetScalar( checkProject );
if( CHECK_OBSTACLE_DISTANCE < projectScalar ){ continue; }
//障害物周辺を向いていない場合も無視.
if( !LMath::IsCollisionCircle( checkProject, disObs, CHECK_OBSTACLE_RANGE ) ){
continue;
}
//向き.
float disObsDir = ADJUST_RAD( atan2f( -disObs.y, disObs.x ) );
disObsDir = ADJUST_RAD( disObsDir - selfDir );
//障害物にぶつからない方向に曲がる.
const float m = ( disObsDir <= L_PI ) ? -1.0f : 1.0f;
const float coef = ( CHECK_OBSTACLE_DISTANCE - projectScalar ) / CHECK_OBSTACLE_DISTANCE;
g_obsAvoidDir += m * CHECK_OBSTACLE_RADIUS * coef;
}
if( inViewNum > 0 ){
//何かが自分の視野内に入っている.
//自分の分も平均に含める.
g_avePosNum++;
g_aveDirNum++;
//各ルールの適用.
{
float dir = 0.0f;
//結合.
if( 0 < g_avePosNum )
{
g_avePos /= (float)g_avePosNum;
const float absoluteDir = ADJUST_RAD( atan2f( -g_avePos.y, g_avePos.x ) );
dir += LMath::GetRotateRad( selfDir, absoluteDir );
}
//整列.
if( 0 < g_aveDirNum )
{
g_aveDir /= ( float )g_aveDirNum;
dir += g_aveDir;
}
//分離.
{
dir += g_separateDir;
}
//障害物回避.
{
dir += g_obsAvoidDir;
}
//0~L_2PIの範囲に入るように調整.
while( (dir < 0.000f) || (dir > L_2PI) ){
dir = ADJUST_RAD( dir );
}
//方向を更新.
selfDir = ADJUST_RAD( selfDir + dir );
//位置を更新.
selfPos.x += selfVel * cosf( selfDir );
selfPos.y += selfVel * -sinf( selfDir );
}
}
else{
//視野内に何もいないので,自分で行先を決める.
//今回は障害物のみ考慮した方向決定.
//障害物回避考慮.
float dir = g_obsAvoidDir;
//0~L_2PIの範囲に入るように調整.
while( (dir < 0.000f) || (dir > L_2PI) ){
dir = ADJUST_RAD( dir );
}
//方向を更新.
selfDir = ADJUST_RAD( selfDir + dir );
//位置を更新.
selfPos.x += selfVel * cosf( selfDir );
selfPos.y += selfVel * -sinf( selfDir );
}
}
視野や分離周りのパラメータは,状況に応じて調整するものである.
視野範囲を大きくしたり,視野を広げたりすれば,群れができやすくなる.
分離範囲を大きくしたり,最大分離角度を180度に近づければ,群れが分かれやすくなる.
また,視野内にBoidがいない場合の行動において,
プレイヤーを追う,といったことをさせれば,
そのBoidがリーダー的存在となって群れが行動するようになる.
上記サンプルは,コメントアウトしてある箇所を埋めれば,
ある程度ちゃんと動くはず.
注意
角度計算
上記サンプルの中で,以下のようなコードがある.
float GetRotateRad( const float from, const float to )
{
//角度候補1.
const float dir1st = ( to - from );
const float dir1stVal = fabsf( dir1st );
//角度候補2.
const float dir2ndVal = ( L_2PI - dir1stVal );
const float dir2nd = ((dir1st>=0.0f)?-1.0f:1.0f) * dir2ndVal;
//絶対値が小さい方を採用.
return ( dir1stVal > dir2ndVal ) ? dir2nd : dir1st;
}
これは,累積値を計算する際に,角度が大きい方を採用していると,
計算結果がおかしくなる,という現象を防ぐために行っている.
例えば,自分から見て30°方向と-30°方向にBoidがいた時に,
本来なら( 30 + (-30) ) / 2 = 0°となるはずが,
( 30 + 330 ) / 2 = 180°と計算してしまうバグを防ぐ効果がある.
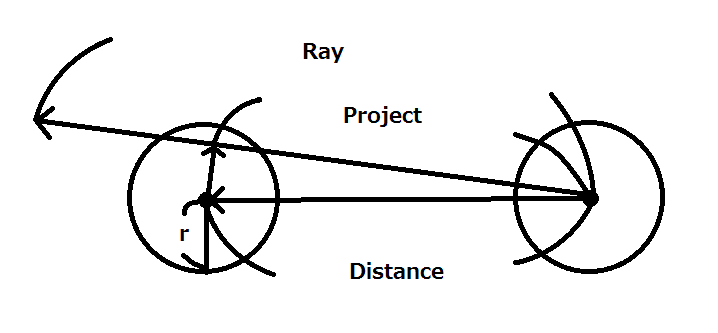
障害物計算
コードだとちょっとわかりづらいので,以下のイメージを参照してもらいたい.
やっていることは比較的単純なことである.
動作状況
手元のビジュアライザーで動作確認をしてみた.
障害物や周りのBoidを気にしながら,群れ行動をしていることはわかると思う.
(使っている画像は大昔にWeb上から拾ってきたものである.ライセンス的にまずいなどを知っている方がいたら教えてほしい.)
(ざっと調べた感じだとFirst Seed Materialさんのものらしいがサイトは閉鎖,または移動したとのこと.)
総括
仕組みは非常に単純ながら,群れ行動をしっかりシミュレートできていて,
とても感動する.動いている状態をボーッと見ているだけでも楽しい.
このままゲームに実装されていることもあるらしいので,
単純ながら非常に強力なアルゴリズムだと思われる.
最高.