注意!
PyTorch 0.4 以降、Variableは非推奨となり、Tensorに統合されました。
Welcome to the migration guide for PyTorch 0.4.0. In this release we introduced many exciting new features and critical bug fixes, with the goal of providing users a better and cleaner interface. In this guide, we will cover the most important changes in migrating existing code from previous versions:
・ Tensors and Variables have merged
よって、本記事の内容は一部サポートされていませんので、0.4向けに改変された元のTutorialを見てください!
本記事について
本記事は,前回の記事に引き続き,PyTorchチュートリアル(4/5)を動かしてみたノートです。
このノートは,公式ドキュメントに公開されている5つのチュートリアルのうちの4つ目:
- Training a classifier
の日本語訳と,適宜説明を追加しています。
References:
分類器の学習
これまで,ニューラルネットワークの定義の仕方,損失の計算,パラメータの更新についてざっくりみてきました。
ここまできたら,次に考えるべきことは:
何のデータを取り扱うの?
一般に,画像,テキスト,音声,ビデオなどのデータを処理するとき,それらに対応したPythonの標準的なパッケージを使ってnumpy配列にデータを読み込むことができます。そしてこのnumpy配列をtorch.*Tensorに変換することができます。
扱うデータによって,下記のようなパッケージがあります:
- 画像:Pillow, OpenCV
- 音声:scipy, librosa
- テキスト:NLTK, SpaCy
画像に関して,visionというパッケージがありますが,これをtorchvisionとしてPyTorchチームは新しく作り変えました。これによって,ImageNetやCIFAR10,MNISTなどの標準となっているデータセットを読み込んだり,データ変換などの機能を持ちます。これらは,torchvision.datasets,torch.utils.data.DataLoaderに入っています。
torchvisionにはこうした高次の実装が行われているので,新しくコードを書く必要がなく,とても便利です。
このチュートリアルでは,CIFAR10データセットを使います。
CIFAR10には,下記の10クラスがあります:
‘airplane’, ‘automobile’, ‘bird’, ‘cat’, ‘deer’, ‘dog’, ‘frog’, ‘horse’, ‘ship’, ‘truck'
CIFAR10に含まれる画像サイズは 3x32x32 つまり,3つのカラーチャンネルを持つ32x32のピクセルからなります。
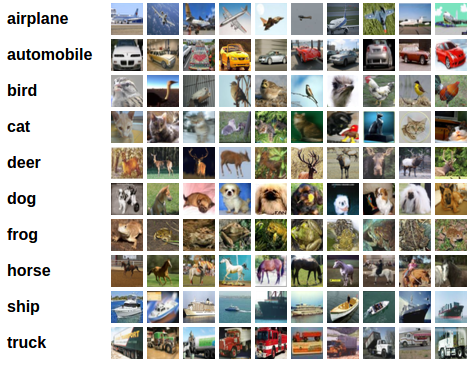
cifar10
画像分類器の学習
CIFAR10を用いた画像分類器の訓練のために,下記の工程を順に行います。
-
- 学習用画像とテスト用画像を読み込み,正規化する。このとき,
torchvisionを使う。
- 学習用画像とテスト用画像を読み込み,正規化する。このとき,
-
- 畳み込みニューラルネットワークを定義する。
-
- 損失関数を定義する。
-
- 学習用画像を用いて学習する。
-
- テスト用画像を用いてテストする。
1. CIFAR10の読み込みと正規化
torchvisionを使えば,CIFAR10の読み込みはとても簡単にできます。
import torch
import torchvision
import torchvision.transforms as transforms
torchvision に含まれるデータセットはPILImageで,$[0,1]$のレンジを持ちます。これを,$[-1,1]$に正規化したテンソルに変換します。
transform = transforms.Compose(
[transforms.ToTensor(),
transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5))])
trainset = torchvision.datasets.CIFAR10(root='./data', train=True,
download=True, transform=transform)
trainloader = torch.utils.data.DataLoader(trainset, batch_size=4,
shuffle=True, num_workers=2)
testset = torchvision.datasets.CIFAR10(root='./data', train=False,
download=True, transform=transform)
testloader = torch.utils.data.DataLoader(testset, batch_size=4,
shuffle=False, num_workers=2)
classes = ('plane', 'car', 'bird', 'cat',
'deer', 'dog', 'frog', 'horse', 'ship', 'truck')
Files already downloaded and verified
Files already downloaded and verified
試しに,データセットに含まれている画像がどんなものなのか見てみましょう。
import matplotlib.pyplot as plt
import numpy as np
# functions to show an image
def imshow(img):
img = img / 2 + 0.5 # unnormalize
npimg = img.numpy()
plt.imshow(np.transpose(npimg, (1, 2, 0)))
# get some random training images
dataiter = iter(trainloader)
images, labels = dataiter.next()
# show images
imshow(torchvision.utils.make_grid(images))
# print labels
print(' '.join('%5s' % classes[labels[j]] for j in range(4)))
frog deer cat truck
2. 畳み込みニューラルネットワークを定義する
1つ前のチュートリアルで示したニューラルネットワークのコードをコピーしてきて,画像のチャンネルを3に変更します。前回のものは白黒画像だったので,チャンネルは1でした。変更後のモデルは次のようになります。
from torch.autograd import Variable
import torch.nn as nn
import torch.nn.functional as F
class Net(nn.Module):
def __init__(self):
super(Net, self).__init__()
self.conv1 = nn.Conv2d(3, 6, 5)
self.pool = nn.MaxPool2d(2, 2)
self.conv2 = nn.Conv2d(6, 16, 5)
self.fc1 = nn.Linear(16 * 5 * 5, 120)
self.fc2 = nn.Linear(120, 84)
self.fc3 = nn.Linear(84, 10)
def forward(self, x):
x = self.pool(F.relu(self.conv1(x)))
x = self.pool(F.relu(self.conv2(x)))
x = x.view(-1, 16 * 5 * 5)
x = F.relu(self.fc1(x))
x = F.relu(self.fc2(x))
x = self.fc3(x)
return x
net = Net()
3. 損失関数の定義と最適化
損失関数として分類学習のクロスエントロピーを,最適化手法として,確率的勾配降下法(SGD)+モーメンタム法を使います。
import torch.optim as optim
criterion = nn.CrossEntropyLoss()
optimizer = optim.SGD(net.parameters(), lr=0.001, momentum=0.9)
4. ネットワークを学習させる
ここからが楽しいところですね。学習は,ネットワークへの入力と最適化を学習データの数だけループさせることで行います。
for epoch in range(2): # loop over the dataset multiple times
running_loss = 0.0
for i, data in enumerate(trainloader, 0):
# get the inputs
inputs, labels = data
# wrap them in Variable
inputs, labels = Variable(inputs), Variable(labels)
# zero the parameter gradients
optimizer.zero_grad()
# forward + backward + optimize
outputs = net(inputs)
loss = criterion(outputs, labels)
loss.backward()
optimizer.step()
# print statistics
running_loss += loss.data[0]
if i % 2000 == 1999: # print every 2000 mini-batches
print('[%d, %5d] loss: %.3f' %
(epoch + 1, i + 1, running_loss / 2000))
running_loss = 0.0
print('Finished Training')
[1, 2000] loss: 2.172
[1, 4000] loss: 1.811
[1, 6000] loss: 1.660
[1, 8000] loss: 1.569
[1, 10000] loss: 1.535
[1, 12000] loss: 1.456
[2, 2000] loss: 1.397
[2, 4000] loss: 1.371
[2, 6000] loss: 1.364
[2, 8000] loss: 1.315
[2, 10000] loss: 1.311
[2, 12000] loss: 1.273
Finished Training
5. テストデータでネットワークをテストする
1つ前の出力を見たらわかりますが,学習用データセットの2周分でネットワークを学習させました。しかし,ネットワークがちゃんと学習したかどうか確認する必要があります。
つまり,学習したニューラルネットワークの出力(つまり予測クラス)が,入力画像のクラスラベルと一致しているかを確認すればよいですね。もし,予測がうまくいっていたら,正しく予測できたリストにサンプルを追加します。
それでは,具体的にどうするか見ていきます。まず,テストデータの一部とそのクラスラベルを表示してみましょう:
dataiter = iter(testloader)
images, labels = dataiter.next()
# print images
imshow(torchvision.utils.make_grid(images))
print('GroundTruth: ', ' '.join('%5s' % classes[labels[j]] for j in range(4)))
GroundTruth: cat ship ship plane
それでは,学習したニューラルネットワークがどのように上記の画像を予測するのでしょうか。
outputs = net(Variable(images))
出力は10クラスのどれかです。ニューラルネットワークは,10クラスのどれが尤もらしいかを数字で表現します。数字が高いほど,そのクラスに属している可能性が高いと判断するということです。ここで,上記の4つの各々の画像に対して,一番高い数値を与えたクラスを出力してみます。
_, predicted = torch.max(outputs.data, 1)
print('Predicted: ', ' '.join('%5s' % classes[predicted[j]]
for j in range(4)))
Predicted: cat ship ship ship
良さそうな結果が得られました!
それでは,全てのテストデータに対して,どのような予測結果を与えるかを見てみましょう。
correct = 0
total = 0
for data in testloader:
images, labels = data
outputs = net(Variable(images))
_, predicted = torch.max(outputs.data, 1)
total += labels.size(0)
correct += (predicted == labels).sum()
print('Accuracy of the network on the 10000 test images: %d %%' % (
100 * correct / total))
Accuracy of the network on the 10000 test images: 56 %
この結果は,ランダムにクラスを選んだ場合(確率0.1)よりも良い結果ですね!これは,ネットワークがランダムに画像にクラスを割り当ててるのではなく,何かを学習したうえでラベルを予測していると言ってよいでしょう。
では次に,どのクラスがどれだけ良く予測できたかを見てみましょう。
class_correct = list(0. for i in range(10))
class_total = list(0. for i in range(10))
for data in testloader:
images, labels = data
outputs = net(Variable(images))
_, predicted = torch.max(outputs.data, 1)
c = (predicted == labels).squeeze()
for i in range(4):
label = labels[i]
class_correct[label] += c[i]
class_total[label] += 1
for i in range(10):
print('Accuracy of %5s : %2d %%' % (
classes[i], 100 * class_correct[i] / class_total[i]))
Accuracy of plane : 61 %
Accuracy of car : 77 %
Accuracy of bird : 34 %
Accuracy of cat : 28 %
Accuracy of deer : 38 %
Accuracy of dog : 69 %
Accuracy of frog : 68 %
Accuracy of horse : 58 %
Accuracy of ship : 74 %
Accuracy of truck : 50 %
更にGPU向けの記述がありますが,後日追加します。