連載目次
- 概要 Raspberry Pi Multicopter
- ラズパイが空を飛ぶまで (0.準備編)
- センサー編
- 制御編
- 飛行編
準備編、センサー編、制御編、飛行編(完)で連載の予定。
進捗があればこの記事を随時、通知付きでアップデートする予定です。
前回のエピソード:設計編
raspberry pi 3 テスト 2016/10/21-2016/10/22
-
Rasp3, ヒートシンク, Navio2 が到着(全部Amazon購入)。
-
[Navio2はGPSアンテナ、7~14V→5Vスイッチング電源、ワイヤーなど全部コミコミ。] (https://emlid.com/shop/navio2/)
-
Raspbian lite をSDHCカードに書き込み
-
-
sudo raspi-configでChange Keyboard Optionsで Generic 101
-
-
Wifi接続の設定
* アクセスポイント側でRaspのMACアドレスに対してDHCPのIPアドレスの割当を固定 -
スイッチング電源の長時間運用テスト (6.0V-14.8V)
-
Navio2をスタックした状態で、半分ビニールをかぶせて温度チェック
-
SSHがメインのためGPUのMemory Splitを最低の16MBに減少
-
6V~15VまでDC-DCにかけてラズパイが動作することを確認
-
> 6Vで低電圧警告付きで安定稼働 (CPU 600MHz 100% + Navio2ボード稼働) -
> 6.75Vで電圧警告なしの安定 (CPU 1.2GHz 100% + Navio2ボード稼働)
-
モーター テスト 2016/10/24-2016/10/26
-
モーターをESCへのPWMでコントロール
- 12inch propも載せてまわしてみる (1秒だけ回した)
- たった1秒で親指をけがした

- 回転によりめちゃくちゃ線が絡まっている
- たった1秒で親指をけがした
- 12inch propも載せてまわしてみる (1秒だけ回した)
-
ESC USB Linker / BLHeli関連 (Turnigy 20A v2 は BLheli でATMEL BLHeli Bootloader (USB/COM)で焼く)
- ファームウェアをアップデート
- 設定で Programming by TX (ESCへの入力で設定を変更できる;これをやるとへんなコマンドをNAVIO2のPWMから出して不意に設定が変わるかもしれない)をOFF
組み立て 2016/11/13
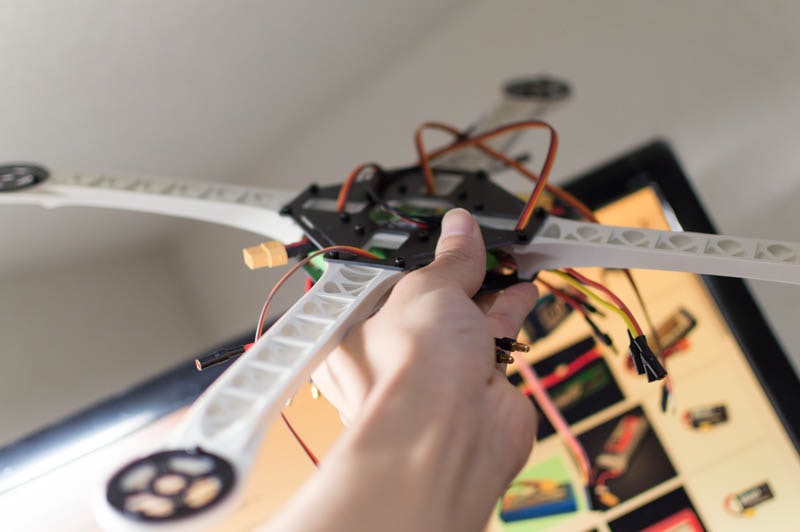
- 六角ねじ や 星ねじのドライバーが届いたので組み立て。
- ESCを無理やり押し込んでいく
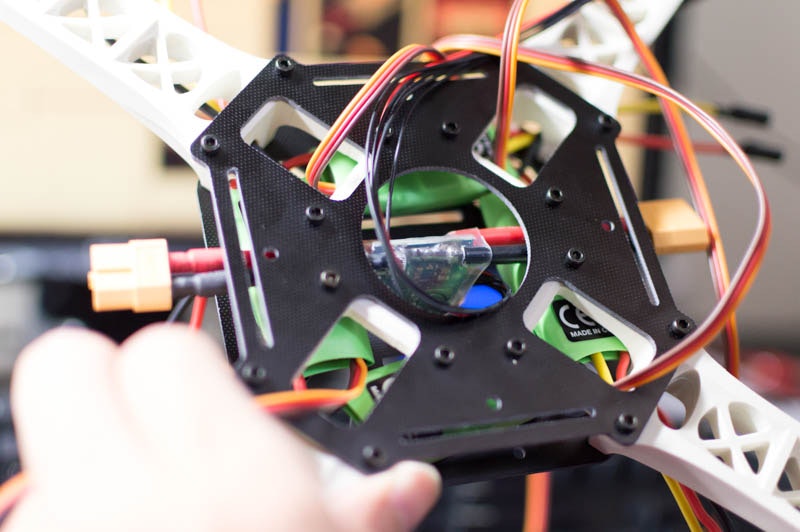
- 組むと案外重い
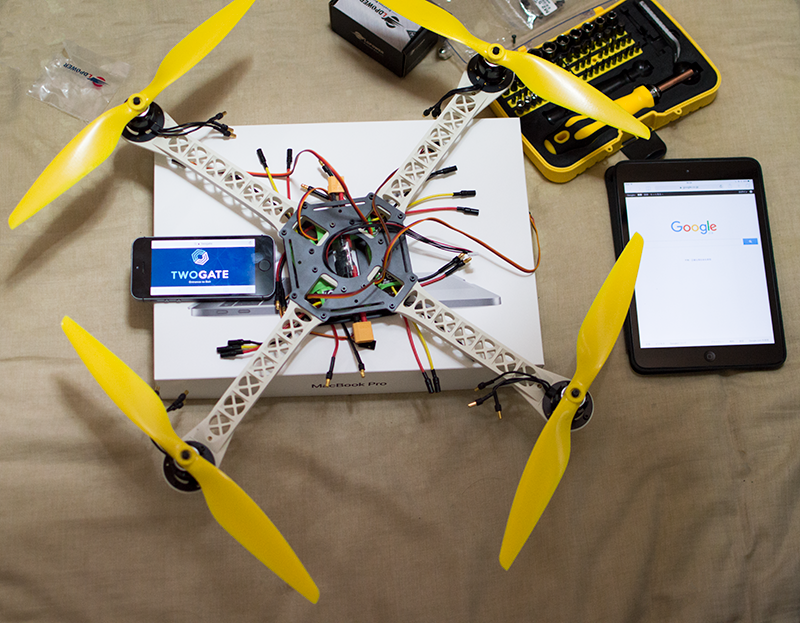
- 左はiPhone 5s、右はiPad mini 2
- 計算した重量で収まってるかは疑問…秤が無い。
- プロペラが巨大だが干渉はなかった。
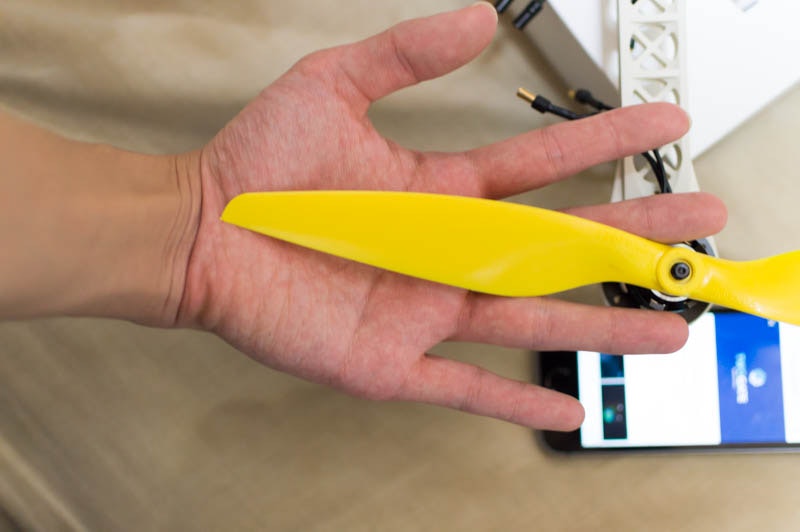
- 手のひらサイズ(半径が)
プロペラテスト 2016/12/08, 09
Navio2サンプルコードにて回転させる。
固定不足でペラが飛んだり、機体がひっくりかえったりしたものの(また怪我した)、1つのペラだけで一応浮いた。
この部分で、モーターをarming(アーム)する。この操作を行って初めて、モーターを起動できる。
何をしているかというと、送信機(トランスミッター、ラジコン用語的にはプロポ)でスロットル最小値から最大値まで素早く動かし、また最小値に戻すという操作とみなせる。ESCによってアーミングのプロシージャは異なるが、今回はこうやってアームできる。
for (double i=SERVO_MIN; i<SERVO_MAX; i+=0.001) {
pwm.set_duty_cycle(PWM_OUTPUT, i);
usleep(800);
}
printf("max/2\n");
for (double i=SERVO_MAX; i>SERVO_MIN; i-=0.001) {
pwm.set_duty_cycle(PWM_OUTPUT, i);
usleep(800);
}
その次に、最小値から中間値までなだらかに加速させる。
for (double i=SERVO_MIN; i<SERVO_MID; i+=0.001) {
pwm.set_duty_cycle(PWM_OUTPUT, i);
usleep(30000);
}
全貌はこちら。
# include <unistd.h>
# include <stdio.h>
# include "Navio/PWM.h"
# include "Navio/Util.h"
# define PWM_OUTPUT 2
# define SERVO_MIN 1.000 /*mS*/
# define SERVO_MAX 1.750 /*mS*/
# define SERVO_MID SERVO_MIN+(SERVO_MAX - SERVO_MIN) / 5.0 /*mS*/
int main()
{
PWM pwm;
if (check_apm()) {
return 1;
}
if (!pwm.init(PWM_OUTPUT)) {
fprintf(stderr, "Output Enable not set. Are you root?\n");
return 0;
}
pwm.enable(PWM_OUTPUT);
pwm.set_period(PWM_OUTPUT, 50);
// while (true) {
pwm.set_duty_cycle(PWM_OUTPUT, SERVO_MIN);
sleep(1);
for (double i=SERVO_MIN; i<SERVO_MAX; i+=0.001) {
pwm.set_duty_cycle(PWM_OUTPUT, i);
usleep(800);
}
printf("max/2\n");
for (double i=SERVO_MAX; i>SERVO_MIN; i-=0.001) {
pwm.set_duty_cycle(PWM_OUTPUT, i);
usleep(800);
}
sleep(1);
printf("\nmin\n");
for (double i=SERVO_MIN; i<SERVO_MID; i+=0.001) {
pwm.set_duty_cycle(PWM_OUTPUT, i);
usleep(30000);
}
sleep(1);
// }
return 0;
}
次回(日程未定)予定
- パワーソースを分電して4つのESCに分配
- 分電盤か分電ケーブル?を購入。
- わけがわからないPWMの制御を抽象化したい。
- パーセンテージでスロットルコントロールしたいのと、ステートレスにしたい。
- センサーをいじる!