デモ機製作の舞台裏を覗く - ラズパイとNode-REDでポータブルなデモ機を作る(第1回)
こんにちは!京セラコミュニケーションシステムの大山です。
久しぶりの投稿となります。2023年7月頃から外観検査AIパッケージという撮影した画像から対象物のキズや汚れ等を異常を検出・分類してくれるAIパッケージとして2種類のデモ機を製作中です。といっても私の担当部分はAIに送るための画像を撮る側ですのでAIのAの字も出てきませんが(笑)
物として見せる側の製作過程をブログに上げてみるのも面白いのではということで失敗したところや苦心したところ、工夫したところなど製作の舞台裏を何回かに分けて投稿していきたいと思います。
今回からGoogleCloudPlatform関連の記事ではありませんがお付き合いいただけると幸いです。
この記事の対象者
Node-REDでRaspberryPiのGPIOを制御したい方
Node-REDのダッシュボードを使ってみたい方
ラズパイでリレー制御してみたい方
fischertechnikを動かしてみたい方
デモ機について
デモ機はオンライン検査用とバッチ検査用の2種類を製作中でオンライン検査用は以下写真のfischertechnikを使用して、
バッチ検査については撮像装置のようなもの(ずいぶん曖昧ですが・・)を筐体から作成を進めていきます。
オンライン検査用のfischertechnikが納入されるまで時間があるためバッチ検査用の撮像機から検討を始めてみます。
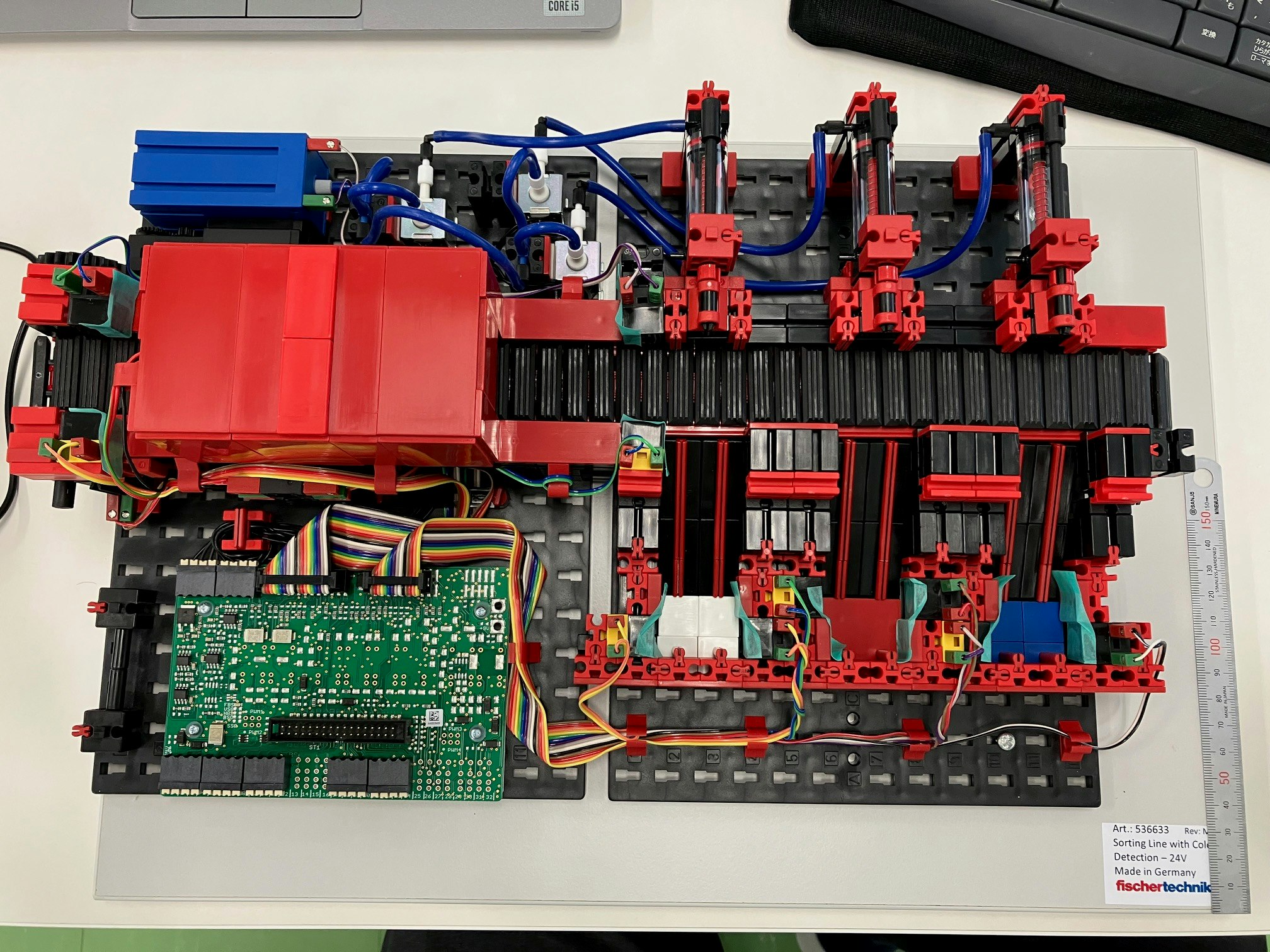
ドイツのfischertechnik社の製品で知育玩具から工学教育など子供から大人まで幅広い年齢層で活用されている教材模型です。今回オンライン検査用として写真のようなカラーセンサーによる色識別と識別色によって搬送経路をかえるミニ検査ラインをデモ機として使います。
ただしそのままの使用ではなく写真左側の赤い箱(カラーセンサ)を取り外して、撮像用のカメラを設置するなど変更を入れる予定です。
こちらについても今後ご紹介します。
バッチ検査の撮像機を考えてみる
今回バッチ検査で求められる要件としては以下の通りです。
・撮像の際、周囲の環境の影響を受けないこと
・持ち運べる大きさ・重さ
これに基づいて、以下のような筐体を検討しました。
・全面を覆う箱型
・ライトを点灯して撮影する
・ワークを置くための扉設置する
・あまり大きくしない
上記の要件を考慮し、以下のような筐体を考えてみました。
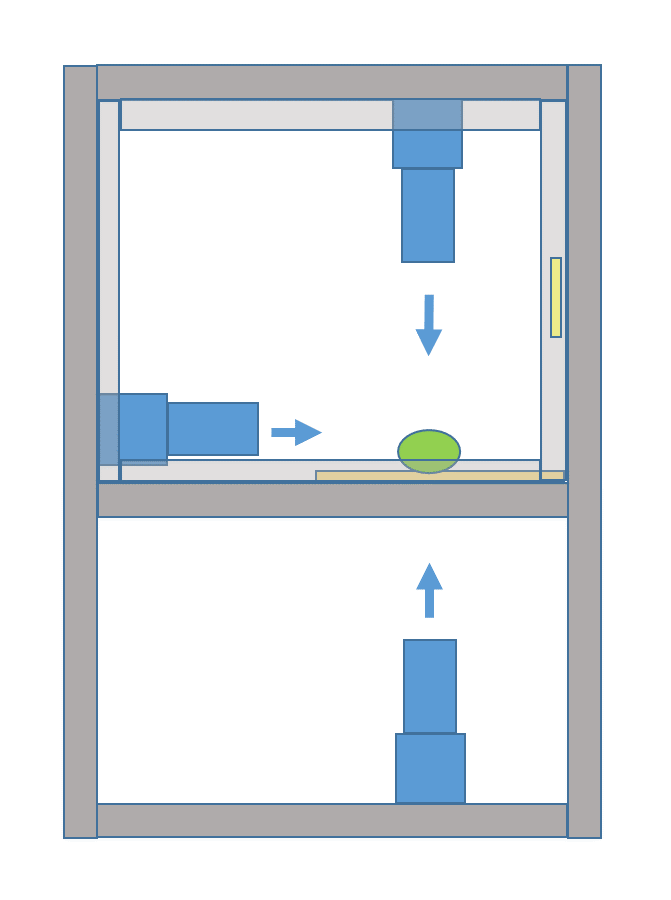
ワークを置くプレートは透明アクリル板でそれ以外のフレーム周りのプレートは黒のアクリル板で周囲の環境の影響を受けないように覆う感じとなります。正面にはワークを置けるよう扉を付けて扉を開けるとワークの設置の際、手元が明るくなるようライトを取り付け予定です。

上記写真のズームカメラを3か所に配置して、上横下からワークを撮影するイメージです。(横については左側の1点のみですが・・・)
筐体サイズとしては縦330mm×横230mm×奥行き230㎜ですので取手を付ければ持ち運べるサイズではあるかと思います。
まずはこのイメージのポンチ絵でAIチームメンバーの意見を聞いてみようというところで今回の記事はここまでとなります。
今回は概要についての紹介となりましたが次回から本題であるデモ機の製作過程など舞台裏を投稿していきたいと思います。
ということで次回「バッチ検査ってそういうこと!?」お楽しみに。