Kinect Azure のキャプチャ画像をとりあえず OpenCV で見るところまで。
そんなに難しい所は無いです。
Memo
-
K4A_IMAGE_FORMAT_COLOR_BGRA32を指定しないと BGRA で降りてこない(JPEG のまま)
Example
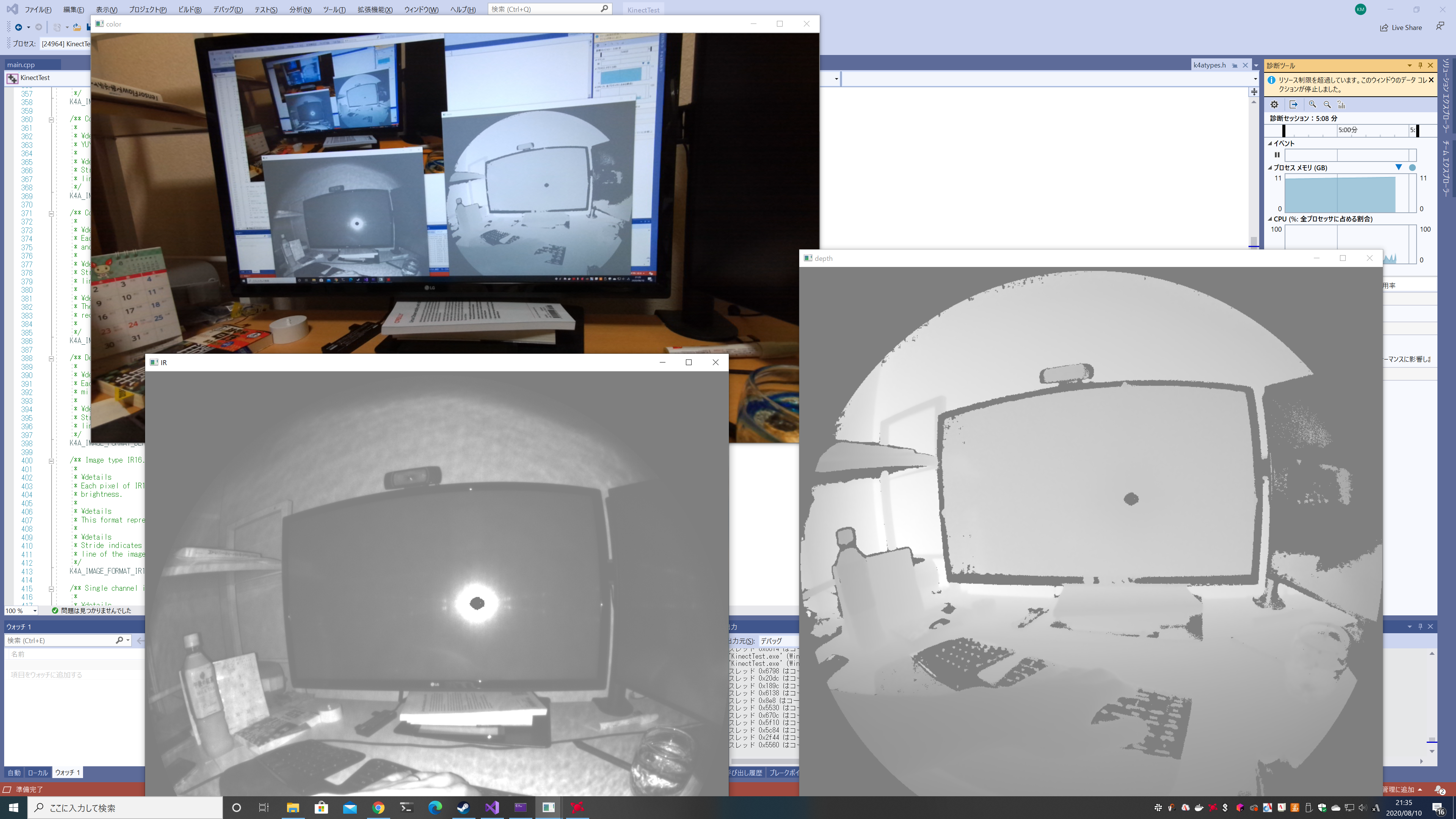
Code
# include <iostream>
# include <k4a/k4a.h>
# include <k4arecord/record.h>
# include <k4arecord/playback.h>
# include <opencv2/core/core.hpp>
# include <opencv2/highgui.hpp>
# ifdef _DEBUG
# pragma comment(lib, "opencv_world430d.lib")
# else
# pragma comment(lib, "opencv_world430.lib")
# endif // DEBUG
int main() {
uint32_t count = k4a_device_get_installed_count();
if (count == 0)
{
printf("No k4a devices attached!\n");
return 1;
}
// Open the first plugged in Kinect device
k4a_device_t device = NULL;
if (K4A_FAILED(k4a_device_open(K4A_DEVICE_DEFAULT, &device)))
{
printf("Failed to open k4a device!\n");
return 1;
}
// Configure a stream with 720P BRGA color
k4a_device_configuration_t config = K4A_DEVICE_CONFIG_INIT_DISABLE_ALL;
config.camera_fps = K4A_FRAMES_PER_SECOND_15;
config.color_format = K4A_IMAGE_FORMAT_COLOR_BGRA32;
config.color_resolution = K4A_COLOR_RESOLUTION_720P;
config.depth_mode = K4A_DEPTH_MODE_WFOV_UNBINNED;
// Start the camera with the given configuration
if (K4A_FAILED(k4a_device_start_cameras(device, &config)))
{
printf("Failed to start cameras!\n");
k4a_device_close(device);
return 1;
}
while (cv::waitKey(1) != 'q') {
// Capture a depth frame
k4a_capture_t capture;
switch (k4a_device_get_capture(device, &capture, 1000))
{
case K4A_WAIT_RESULT_SUCCEEDED:
break;
case K4A_WAIT_RESULT_TIMEOUT:
printf("Timed out waiting for a capture\n");
continue;
break;
case K4A_WAIT_RESULT_FAILED:
printf("Failed to read a capture\n");
return 1;
}
// Kinect for Azure color & depth.
const auto k4a_color = k4a_capture_get_color_image(capture);
const auto k4a_ir = k4a_capture_get_ir_image(capture);
const auto k4a_depth = k4a_capture_get_depth_image(capture);
if (k4a_color == NULL || k4a_ir == NULL) {
continue;
}
// Print depth image details.
printf(" | Depth16 res:%4dx%4d stride:%5d\n",
k4a_image_get_height_pixels(k4a_ir),
k4a_image_get_width_pixels(k4a_ir),
k4a_image_get_stride_bytes(k4a_ir));
// Get color as cv::Mat
const auto cv_color = cv::Mat_<cv::Vec4b>(
k4a_image_get_height_pixels(k4a_color),
k4a_image_get_width_pixels(k4a_color),
(cv::Vec4b*)k4a_image_get_buffer(k4a_color),
k4a_image_get_stride_bytes(k4a_color));
cv::imshow("color", cv_color);
const auto cv_ir = cv::Mat_<short>(
k4a_image_get_height_pixels(k4a_ir),
k4a_image_get_width_pixels(k4a_ir),
(short*)k4a_image_get_buffer(k4a_ir),
k4a_image_get_stride_bytes(k4a_ir));
cv::imshow("IR", cv_ir * 20);
const auto cv_depth = cv::Mat_<short>(
k4a_image_get_height_pixels(k4a_depth),
k4a_image_get_width_pixels(k4a_depth),
(short*)k4a_image_get_buffer(k4a_depth),
k4a_image_get_stride_bytes(k4a_depth));
cv::imshow("depth", cv_depth * 40);
cv::waitKey(1);
// Release the image and capture.
k4a_image_release(k4a_color);
k4a_image_release(k4a_ir);
k4a_image_release(k4a_depth);
k4a_capture_release(capture);
}
// Shut down the camera when finished with application logic
k4a_device_stop_cameras(device);
k4a_device_close(device);
return 0;
}