PyRealsense(pyrealsense2)とは
IntelのDepthカメラRealsenseをPythonで扱うためのラッパープログラムです。Pythonで、Realsenseの画像や深度情報を簡単に取得することができます。
Realsenseで、Pythonを使ったディープラーニングで画像認識した上で、深度情報を取得したい、といったときにとても便利ですね。
X86系のPCの場合は、pip install pyrealsenseで簡単にインストールできるのですが、ArmのJetson Nanoだと一工夫必要なので、セットアップ方法と使い方を簡単に紹介します。
なお、この記事ではRealsenseはD435を想定しています。
Librealsenseをソースからビルド
Jetson NanoでPyRealsenseを使うときは、Realsenseのドライバである、Librealsenseをソースからビルドする必要があります。
必要なライブラリのインストール
必要なライブラリをインストールします。
$ sudo apt update
$ sudo apt install -y cmake
注意:自分は、ゼロからセットアップしていないので、ひょっとしたら他にも必要なライブラリなどあるかもしれません。判明次第適宜追記します。
また、ディープラーニングを実施したい人は、以下記事を参照下さい。
Librealsenseのビルドとインストール
以下コマンドで、Librealsenseをダウンロード(git clone)して、ビルドしてインストールします。
$ cd && git clone https://github.com/IntelRealSense/librealsense.git
$ cd librealsense
$ mkdir build
$ cd build
$ cmake ../ -DBUILD_PYTHON_BINDINGS:bool=true
$ make -j4
$ sudo make install
Udev設定
以下のコマンドで、USBでRealsenseを認識させるための、udevのセットアップを行います。
$ cd ~/librealsense
$ ./scripts/setup_udev_rules.sh
パスの設定
パスの追加を行います。
$ export PYTHONPATH=$PYTHONPATH:/usr/local/lib
パスの追加は、毎回実施する必要があります。めんどくさければ~/.bashrcに上記コマンドを追記しておきましょう。
動作確認
サンプルプログラムを実行してみます。
$ cd ~/librealsense/wrappers/python/examples
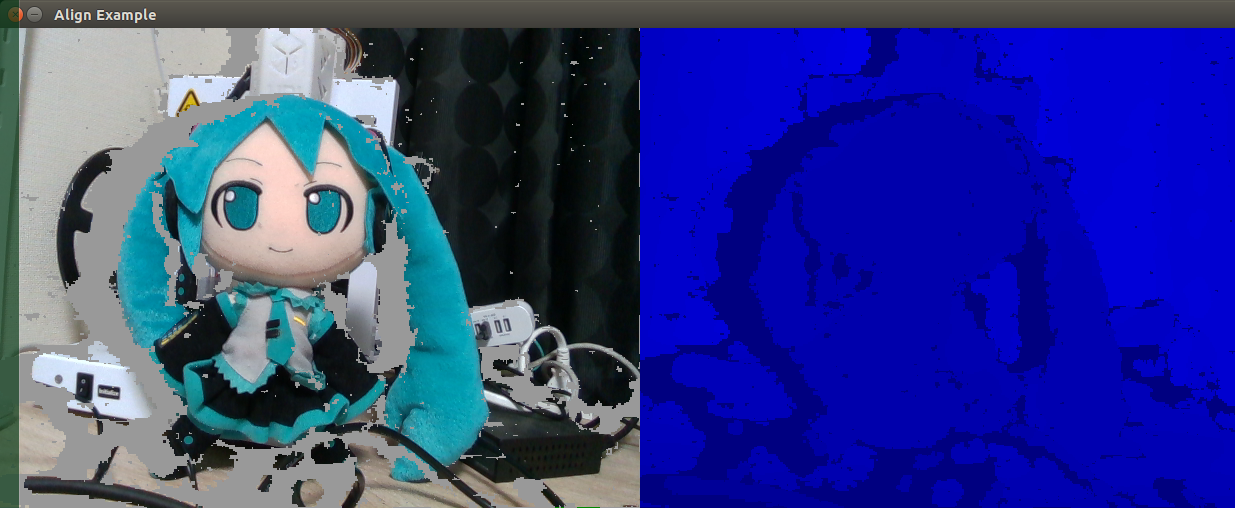
$ python3 align-depth2color.py
以下のように、PythonでRealsenseのカラー画像と深度情報が取得できました。
ソースコードを見れば、使い方はある程度分かると思います。ドキュメントは以下となります。
参考
- http://mirai-tec.hatenablog.com/entry/2018/03/29/000217
- https://github.com/IntelRealSense/librealsense/tree/master/wrappers/python
関連記事