はじめに
電波干渉計の偏波観測データを較正し、相関器の出力からStokes Visibilitiesを求めます。干渉計としてALMAを想定し、直線偏波受信 (X, Y) した信号を相関処理して $\left< XX^* \right> , \left< XY^* \right> , \left< YX^* \right> , \left< YY^* \right> $の4相関対を得ているものとします。この相関対を使ってビジビリティのFull Stokes成分$I, Q, U, V$を求めます。
一般定式化と記号
直線偏波受信システムとD-term
各アンテナで受ける電場の直交2成分(直線偏波成分)を$E_X$, $E_Y$とおきます。一般に光学系と受信機システムにはわずかに混信 (cross talk) があるので、受信機から出力されて相関器に入る信号$X$, $Y$はそれぞれ
X = G_X (E_X + D_X E_Y) \\
Y = G_Y(E_Y + D_Y E_X) \tag{1.1}
と書けるものとします。ここで$D_X$, $D_Y$をD-termと呼び、それぞれ$E_Y \rightarrow X$および$E_X \rightarrow Y$への混信の割合を表わします。式(1.1)は混信によって信号が減少することは無視しているようにも見えますが、線形受信システムでは適当な増幅器や減衰器によって信号レベルをゲイン$G_X$, $G_Y$倍に調整しているので、この式で一般性を失いません。
相関器では基線ごとに2つのアンテナから2偏波の信号を入力して、4つの相関対
$\left< X_j X^*_i\right>$
$\left< X_j Y^*_i\right>$
$\left< Y_j X^*_i\right>$
$\left< Y_j Y^*_i\right>$
を出力します。$i, j$はアンテナの番号で、基線の番号$k$とはCanonical orderingで番号付けされているものとします。
Stokes Parameterと相関対の関係
天体の偏波したビジビリティを、Stokes parameter $\boldsymbol{S} = (I, Q, U, V)$ で表わします。$I$は全フラックス密度, $Q, U$は直線偏波成分, $V$は円偏波成分です。Stokes parameterと相関対との関係は、
\boldsymbol{X} = D P \boldsymbol{S} \tag{1.2}
と表わせます。ここで
\boldsymbol{S} = \left(
\begin{array}{c}
I \\
Q \\
U \\
V \\
\end{array}
\right), \
\boldsymbol{X} = \left(
\begin{array}{c}
\left< XX^* \right> / ( G^j_X G^{i*}_X ) \\
\left< XY^* \right> / ( G^j_X G^{i*}_Y ) \\
\left< YX^* \right> / ( G^j_Y G^{i*}_X ) \\
\left< YY^* \right> / ( G^j_Y G^{i*}_Y ) \\
\end{array}
\right).
です。また、行列$D$と行列$P$はそれぞれ
D =
\left(
\begin{array}{cccc}
1 & D^{i*}_X & D^j_X & D^j_X D^{i*}_X \\
D^{i*}_Y & 1 & D^j_X D^{i*}_Y & D^j_X \\
D^j_Y & D^j_Y D^{i*}_X & 1 & D^{i*}_X \\
D^j_Y D^{i*}_Y & D^j_Y & D^{i*}_Y & 1 \\
\end{array}
\right) \\
P =
\left(
\begin{array}{cccc}
1 & \cos 2\psi & \sin 2\psi & 0 \\
0 & -\sin 2\psi & \cos 2\psi & i \\
0 & -\sin 2\psi & \cos 2\psi & -i \\
1 & -\cos 2\psi & -\sin 2\psi & 0 \\
\end{array}
\right)
です。
Parallactic angle
$\psi$は、$X$偏波フィードが子午線の北方向となす角で、$X$偏波フィードの$EL$方向に対する傾き (BandPA) にparallactic angleを加えた角度で、$\psi = {\rm PA} + {\rm BandPA} - {\rm EVPA}$で与えられます。ALT-AZマウントのアンテナの場合、parallactic angleは (PA) 天体の追尾によって時々刻々変化します。
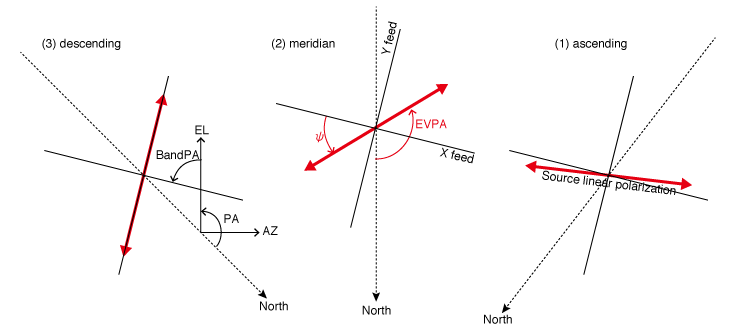
この図は地平座標系で表した天体のEVPAとPAおよび$\psi$の関係です(南半球を想定しています)。赤の矢印で示したのが天体の直線偏波の向きです。子午線北向きを起点とした直線偏波の角度がEVPA (Electric Vector Position Angle) です。天体の日周運動に伴って、地平座標系では子午線の向きは (PA) は変化します。PAは観測地の緯度lat, 天体のAZ角, EL角から、以下のPythonコードで算出できます。
cos_lat, sin_lat = math.cos(lat), math.sin(lat)
PA = np.arctan2( -cos_lat* np.sin(az), (sin_lat* np.cos(el) - cos_lat* np.sin(el)* np.cos(az)) )
観測方程式と較正
観測方程式(1.2)についてまとめます。計測したいのはStokes parameter $\boldsymbol{S}$です。相関対
$\left< X_j X^*_i\right>$,
$\left< X_j Y^*_i\right>$,
$\left< Y_j X^*_i\right>$,
$\left< Y_j Y^*_i\right>$
は手にしている観測量(相関器出力)です。行列$P$は既知です。行列$D$とゲイン$\boldsymbol{G}$は未知量、較正によって求める必要があります。$D$と$\boldsymbol{G}$が定まれば、(1.2)を$\boldsymbol{S}$について解いた式
\boldsymbol{S} = P^{-1} D^{-1} \boldsymbol{X} \tag{1.3}
によってStokes parameter $\boldsymbol{S}$が求まります。ここで$D^{-1}$と$P^{-1}$はそれぞれ
D^{-1} = \frac{1}{(1 - D^j_X D^j_Y)(1 - D^{i*}_X D^{i*}_Y)}
\left(
\begin{array}{cccc}
1 & -D^{i*}_X & -D^j_X & D^j_X D^{i*}_X \\
-D^{i*}_Y & 1 & D^j_X D^{i*}_Y & -D^j_X \\
-D^j_Y & D^j_Y D^{i*}_X & 1 & -D^{i*}_X \\
D^j_Y D^{i*}_Y & -D^j_Y & -D^{i*}_Y & 1 \\
\end{array}
\right), \\
P^{-1} = \frac{1}{2}
\left(
\begin{array}{cccc}
1 & 0 & 0 & 1 \\
\cos 2\psi & -\sin 2\psi & -\sin 2\psi & -\cos 2\psi \\
\sin 2\psi & \cos 2\psi & \cos 2\psi & -\sin 2\psi \\
0 & -i & i & 0 \\
\end{array}
\right)
です。要は$D$と$\boldsymbol{G}$を較正によって求められれば、計測量からStokes parameterを推定できるわけです。
具体的な較正方法について、エントリーを改めて述べます。