ROS2 のIDE開発環境構築 ROS Qt Creator Plug-inの設定を纏めます。
Qt Creatorのインストール
- QTの左メニュー「Qt Creator」リンクより最新版(現在:4.10.0)をダウロード
$ chmod 755 qt-creator-opensource-linux-x86_64-4.10.0.run
$ ./qt-creator-opensource-linux-x86_64-4.10.0.run
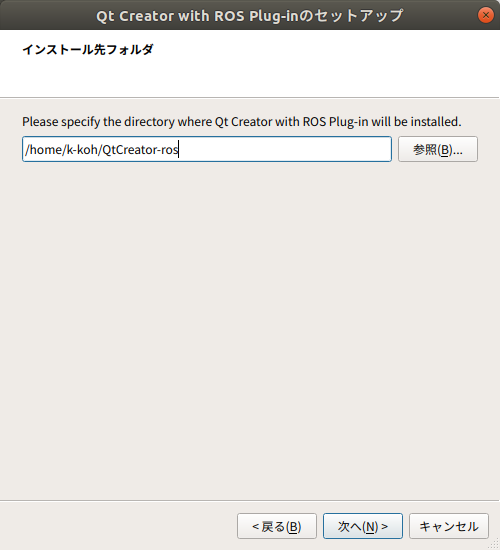
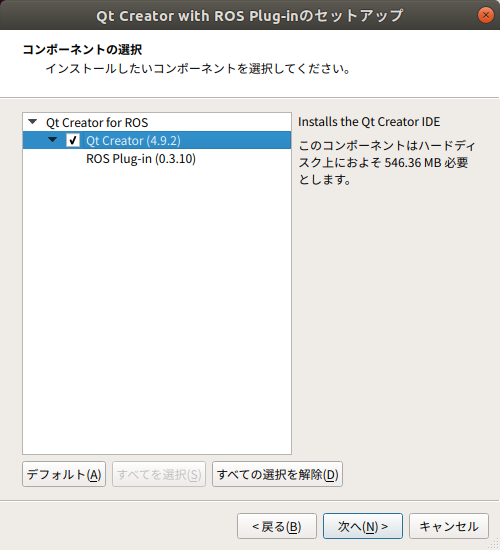
ROS Plug-inのインストール
- ROS Qt Creator Plug-inリンクより最新版をダウロード
$ chmod 755 qtcreator-ros-bionic-latest-online-installer.run
$ ./qtcreator-ros-bionic-latest-online-installer.run
ROS Plug-inの設定
Debug許可
$ sudo gedit /etc/sysctl.d/10-ptrace.conf
change kernel.yama.ptrace_scope to 0
$ sudo systemctl restart procps.service
Syntax Color Schemes設定
Tools > Options > Text Editor > Font & Colors
Monokai(1)を選択
ROS Code Format設定
Tools > Options > C++ > code style
ROSを選択
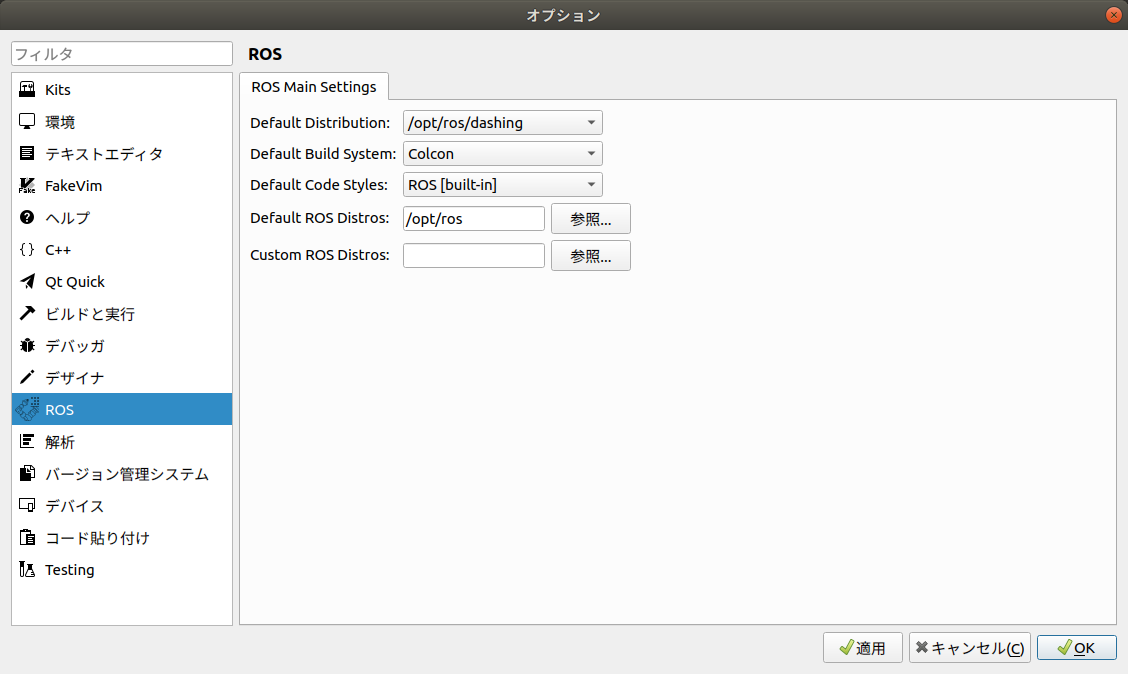
ROS 設定
オプション > ROS
Set Build System to Colcon
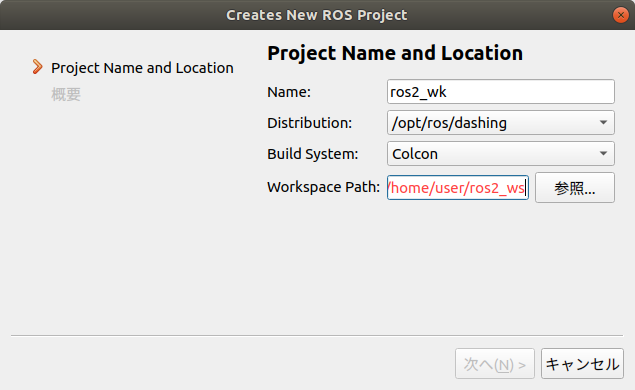
Import a ROS Workspace
New Project > Other Projects > ROS Workspace
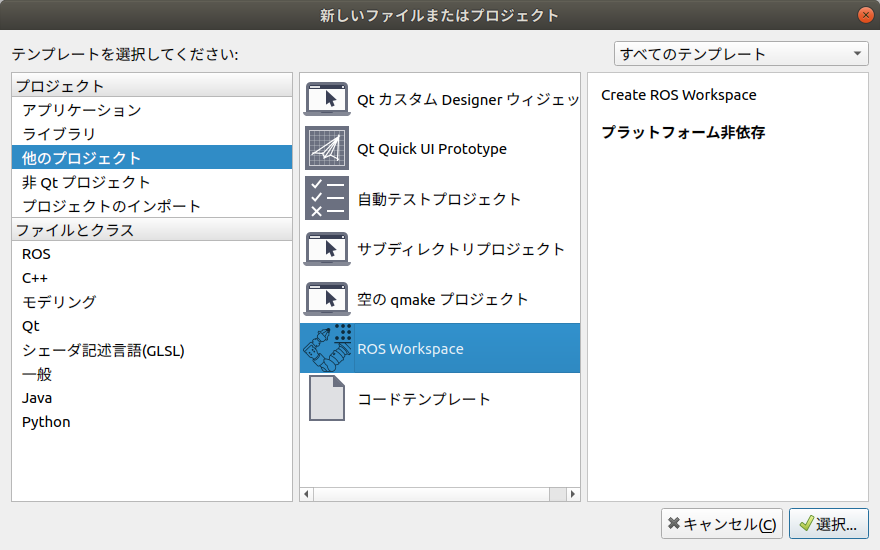
Set Build System to colcon for ros2
ビルド設定
プロジェクト > Build & Run > Build
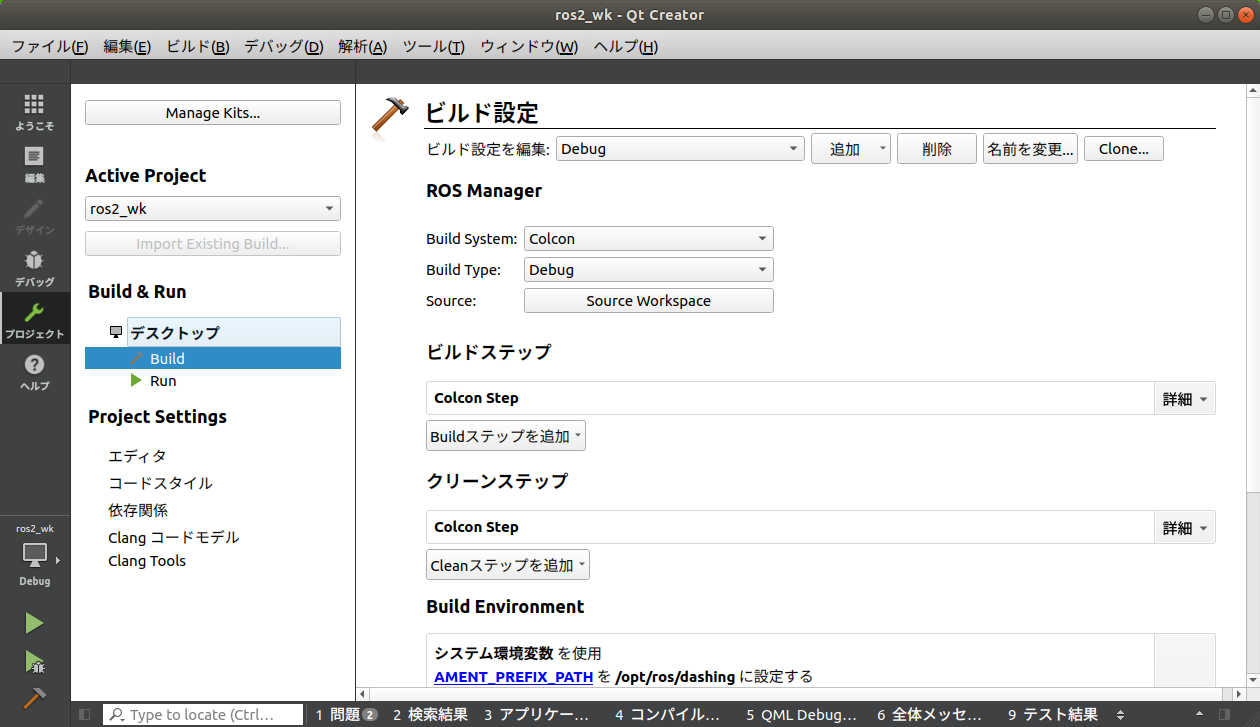
プロジェクト > Build & Run > Run
